
DC12V/24V Motor Controller Relay Board Forward Reverse Control Limit Start Stop
Popular







Product Introduction
Features:
1. Multiple working modes: 9 optional modes, including instantaneous, self-locking, etc.
2. Compact product
3. Wide application: suitable for push bar, electric curtain, automatic door, etc.
4. Support forward or reverse working current
5. Long service life
2. Compact product
3. Wide application: suitable for push bar, electric curtain, automatic door, etc.
4. Support forward or reverse working current
5. Long service life
Specification:
Operating voltage: DC 12V (12V version) or 24V (24V version) (DC power supply power ≥ motor load x3);
Applicable motors: Brushed DC motors;
Maximum load current: 4.5A;
Signal input: active low level (NPN);
Multiple working modes: 9 optional modes, including instantaneous, self-locking, etc.
Operating current (excluding motor): quiescent current: 4MA, forward or reverse operating current: 40MA
Operating voltage: DC 12V (12V version) or 24V (24V version) (DC power supply power ≥ motor load x3);
Applicable motors: Brushed DC motors;
Maximum load current: 4.5A;
Signal input: active low level (NPN);
Multiple working modes: 9 optional modes, including instantaneous, self-locking, etc.
Operating current (excluding motor): quiescent current: 4MA, forward or reverse operating current: 40MA
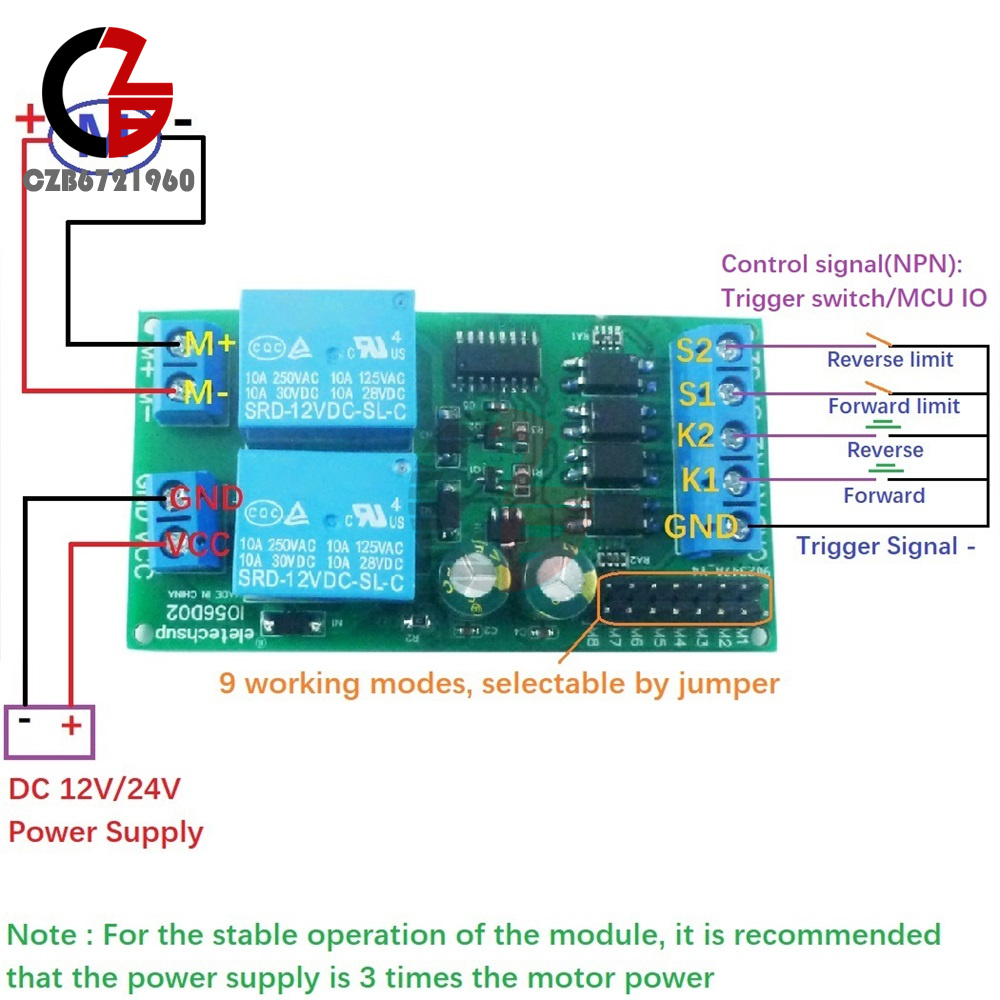
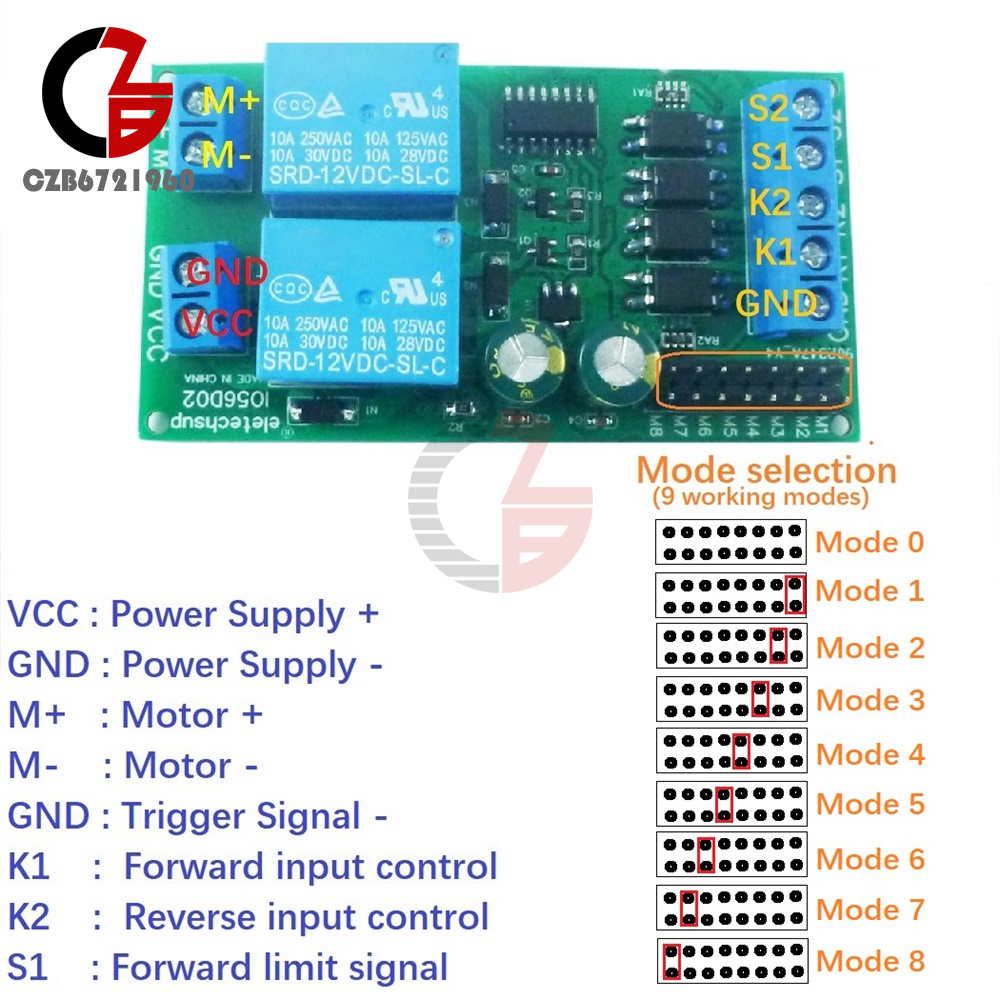
Pin description:
VCC: power supply +
GND: Power supply-
M+:Motor+
M-:Motor-
GND: Trigger signal-
K1: Forward input control
K2: Reverse input control
S1: Forward limit signal
S2: Reverse gear limit signal
VCC: power supply +
GND: Power supply-
M+:Motor+
M-:Motor-
GND: Trigger signal-
K1: Forward input control
K2: Reverse input control
S1: Forward limit signal
S2: Reverse gear limit signal
Technical description:
The module has 4 signal inputs, namely "K1", "K2", "S1" and "S2". K1 is the forward rotation signal input terminal, K2 is the reverse rotation signal input terminal, S2 is the forward rotation limit signal input terminal and S2 is the reverse limit signal input terminal. The signal input source can be selected from micro switch, induction, infrared, metal, remote control and other modules, or controlled by microcontroller.
The module has 4 signal inputs, namely "K1", "K2", "S1" and "S2". K1 is the forward rotation signal input terminal, K2 is the reverse rotation signal input terminal, S2 is the forward rotation limit signal input terminal and S2 is the reverse limit signal input terminal. The signal input source can be selected from micro switch, induction, infrared, metal, remote control and other modules, or controlled by microcontroller.
Operating mode description:
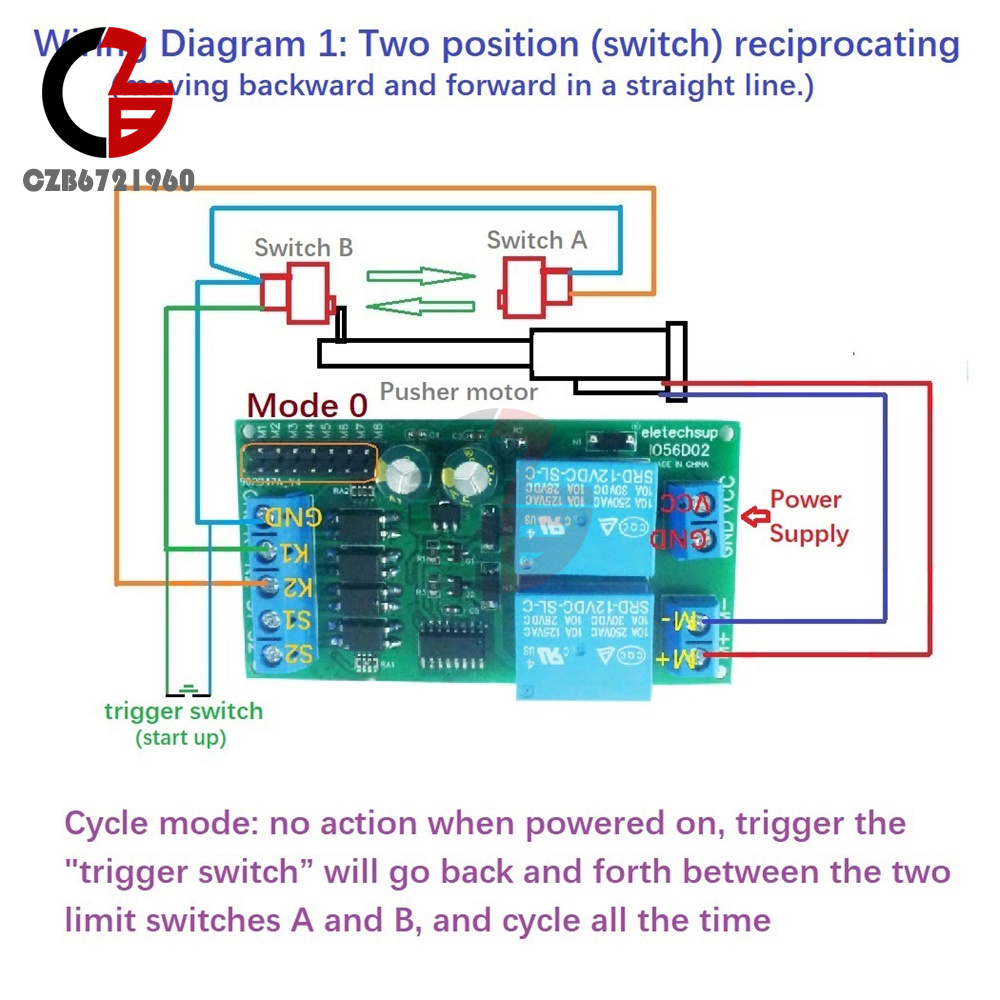
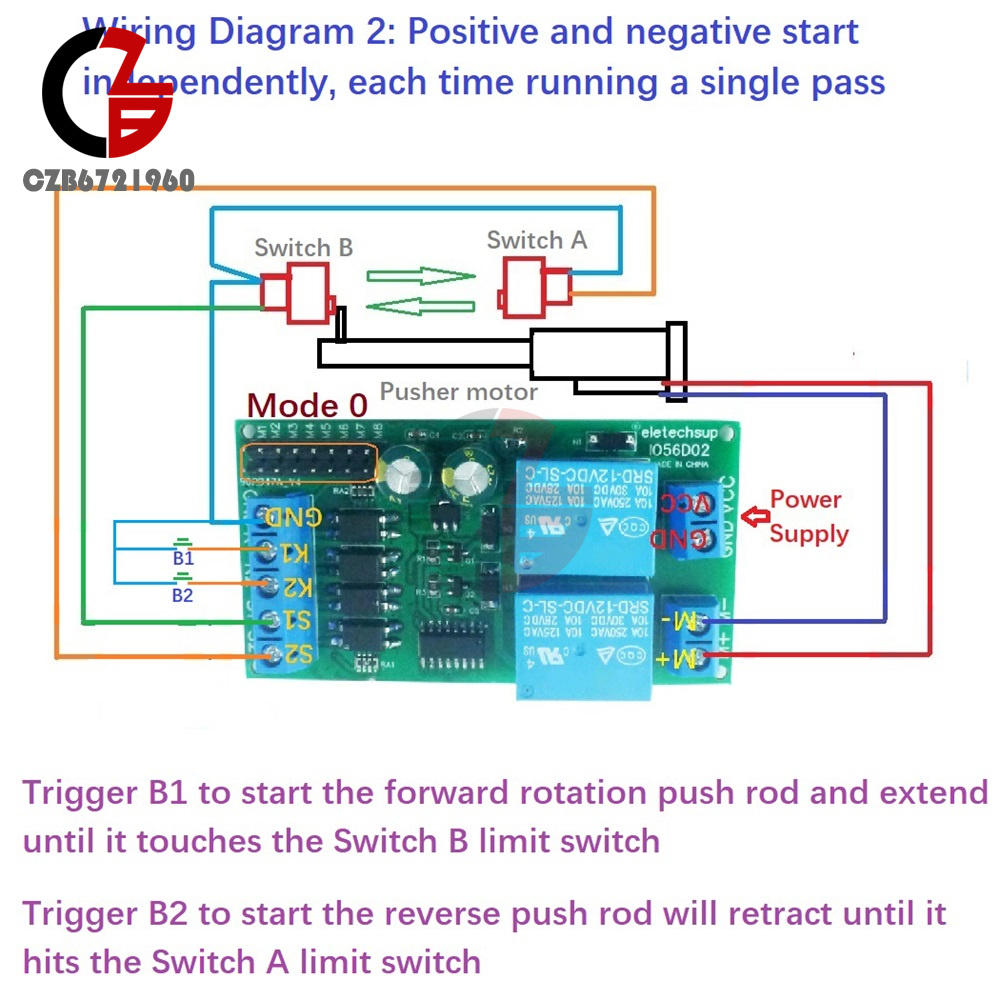
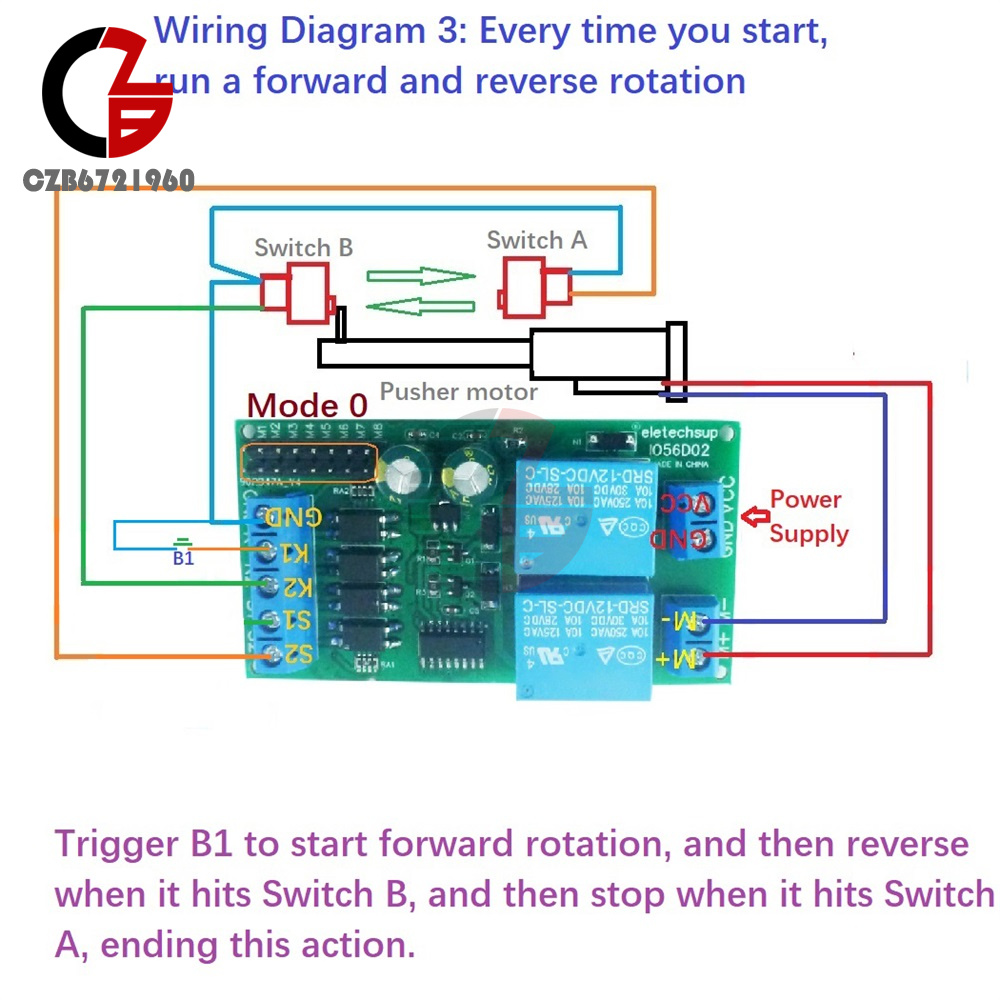
Mode 0 (default):
Self-locking mode, the signal only needs to be triggered once, the module is self-locking to keep running.
When the reverse signal is encountered during forward rotation, it should stop immediately for 0.3 seconds, then enter reverse rotation;
the limit signal has priority, when forward rotation is encountered, the forward limit signal will stop immediately;
Forward rotation cannot start when a forward rotation limit signal is present, and the same is true for reverse rotation;
the forward rotation signal and the reverse rotation signal are valid when a low level, i.e. a short-term 0V level (negative power supply), will be activated;
The limit signal is normally open; (for example, forward rotation cannot be started when the SW1 switch is closed or connected to a low level.)
Only one limit signal is valid at a time; for example, motor rotation cannot be stopped by inputting two limit signals at the same time during reverse rotation.
Mode 0 (default):
Self-locking mode, the signal only needs to be triggered once, the module is self-locking to keep running.
When the reverse signal is encountered during forward rotation, it should stop immediately for 0.3 seconds, then enter reverse rotation;
the limit signal has priority, when forward rotation is encountered, the forward limit signal will stop immediately;
Forward rotation cannot start when a forward rotation limit signal is present, and the same is true for reverse rotation;
the forward rotation signal and the reverse rotation signal are valid when a low level, i.e. a short-term 0V level (negative power supply), will be activated;
The limit signal is normally open; (for example, forward rotation cannot be started when the SW1 switch is closed or connected to a low level.)
Only one limit signal is valid at a time; for example, motor rotation cannot be stopped by inputting two limit signals at the same time during reverse rotation.
Mode 1:
The auto-start version of mode 0 adds the power-on auto-start function to mode 0, which means that forward rotation is automatically started every time the module is powered on. This version is more suitable as a motion module between two points, it will work automatically when the module is powered on.
The auto-start version of mode 0 adds the power-on auto-start function to mode 0, which means that forward rotation is automatically started every time the module is powered on. This version is more suitable as a motion module between two points, it will work automatically when the module is powered on.
Mode 2:
Transient mode. When forward rotation signal exists, the motor rotates forward; when reverse rotation signal exists, the motor reverses; when there is no forward rotation signal and reverse rotation signal, the motor stops; while forward rotation, if forward rotation limit exists, forward rotation will stop; during rotation, if reverse rotation limit signal exists, reverse rotation will stop. Removing the two restriction signals will not resume rotation, and the rotation signal needs to be input again to start forward and reverse rotation.
Transient mode. When forward rotation signal exists, the motor rotates forward; when reverse rotation signal exists, the motor reverses; when there is no forward rotation signal and reverse rotation signal, the motor stops; while forward rotation, if forward rotation limit exists, forward rotation will stop; during rotation, if reverse rotation limit signal exists, reverse rotation will stop. Removing the two restriction signals will not resume rotation, and the rotation signal needs to be input again to start forward and reverse rotation.
Mode 3:
The level drive mode is functionally similar to the H-bridge and operates according to the following logic:
When there is a forward rotation signal and no signal at the forward limit, it will rotate forward; when there is a reverse signal and no signal at the reverse limit, it will reverse; this version is pure logic type and is suitable for microcontroller signal input. Note the forward rotation priority, i.e. forward rotation is when both forward and reverse inputs satisfy the condition.
Note the real-time nature of the levels. For example, when there is a signal at both forward and reverse inputs, this is forward rotation. At this point, if the forward rotation signal is removed and the reverse rotation signal is retained, it will reverse. When the motor is rotating, the limit input is invalid and the motor cannot be stopped.
The level drive mode is functionally similar to the H-bridge and operates according to the following logic:
When there is a forward rotation signal and no signal at the forward limit, it will rotate forward; when there is a reverse signal and no signal at the reverse limit, it will reverse; this version is pure logic type and is suitable for microcontroller signal input. Note the forward rotation priority, i.e. forward rotation is when both forward and reverse inputs satisfy the condition.
Note the real-time nature of the levels. For example, when there is a signal at both forward and reverse inputs, this is forward rotation. At this point, if the forward rotation signal is removed and the reverse rotation signal is retained, it will reverse. When the motor is rotating, the limit input is invalid and the motor cannot be stopped.
Mode 4:
Start/Stop mode with the same function as mode 0, except for the following functional details:
If forward rotation has been started and forward rotation signal is input again, it will stop immediately; if reverse rotation has been started and reverse rotation signal is input again, it will stop immediately. For example, there is a forward signal >> immediate forward rotation; at this time, input forward rotation signal >> immediate stop forward rotation. Reverse rotation is the same.
Start/Stop mode with the same function as mode 0, except for the following functional details:
If forward rotation has been started and forward rotation signal is input again, it will stop immediately; if reverse rotation has been started and reverse rotation signal is input again, it will stop immediately. For example, there is a forward signal >> immediate forward rotation; at this time, input forward rotation signal >> immediate stop forward rotation. Reverse rotation is the same.
Mode 5:
The function is the same as mode 0, only the limit signal differs as follows:
The limit signal is valid only for the current time (frontier valid).
For example, after starting a forward rotation, it will stop when a forward limit signal is encountered. After stopping, it is still possible to start forward rotation by entering a forward rotation signal at this point, even though a forward limit signal is still entered. This specification is usually used when the one-way start and end points are on the same motion circle, for example, pressing once to form one circle and again to form another.
The function is the same as mode 0, only the limit signal differs as follows:
The limit signal is valid only for the current time (frontier valid).
For example, after starting a forward rotation, it will stop when a forward limit signal is encountered. After stopping, it is still possible to start forward rotation by entering a forward rotation signal at this point, even though a forward limit signal is still entered. This specification is usually used when the one-way start and end points are on the same motion circle, for example, pressing once to form one circle and again to form another.
Mode 6:
One-touch switching mode with the same function as mode 0, except that the activation method is different, as follows:
Forward rotation signal input, forward rotation after triggering, reverse rotation after triggering again, reverse rotation signal input is invalid. Input forward rotation signal once, start forward rotation, stop forward rotation when the forward limit has signal; input forward rotation signal again, start reverse rotation, and stop reverse rotation after the reverse rotation limit has signal
One-touch switching mode with the same function as mode 0, except that the activation method is different, as follows:
Forward rotation signal input, forward rotation after triggering, reverse rotation after triggering again, reverse rotation signal input is invalid. Input forward rotation signal once, start forward rotation, stop forward rotation when the forward limit has signal; input forward rotation signal again, start reverse rotation, and stop reverse rotation after the reverse rotation limit has signal
Package List:
1x Relay Module
1x Relay Module
- We accept PayPal only. But we only Accept your Ebay Address,Please Make sure it's 100% right.
- Payment must be received in 5 business days of auction closing.
- Please leave note for your special request (e.g. Colors or Size) in PayPal when you pay the order.
- Any special request cannot be accepted after 24 hours of payment, because most of orders will be processed instantly and same day dispatched.
- We maintain high standards of excellence and strive for 100% customer satisfaction! Feedback is very important to us. We request that you contact us immediately BEFORE you give us neutral or negative feedback, so that we can satisfactorily address your concerns.
- All package need to wait 30 days(US only need 7-10 days),Please take care it.Less than 30 days,we can't take a refund.
- If the item is defect when you receive it or you are not satisfied with it, please return it within 14 days for a replacement or money back. But the items must be back in factory condition. Please contact us and double check the return address before you return it.
- If is item is defective in 12 months, you can return it to us. We will send you a new replacement after receiving the defective item.
DC12V/24V Motor Controller Relay Board Forward Reverse Control Limit Start Stop
Product Introduction
Features:
1. Multiple working modes: 9 optional modes, including instantaneous, self-locking, etc.
2. Compact product
3. Wide application: suitable for push bar, electric curtain, automatic door, etc.
4. Support forward or reverse working current
5. Long service life
2. Compact product
3. Wide application: suitable for push bar, electric curtain, automatic door, etc.
4. Support forward or reverse working current
5. Long service life
Specification:
Operating voltage: DC 12V (12V version) or 24V (24V version) (DC power supply power ≥ motor load x3);
Applicable motors: Brushed DC motors;
Maximum load current: 4.5A;
Signal input: active low level (NPN);
Multiple working modes: 9 optional modes, including instantaneous, self-locking, etc.
Operating current (excluding motor): quiescent current: 4MA, forward or reverse operating current: 40MA
Operating voltage: DC 12V (12V version) or 24V (24V version) (DC power supply power ≥ motor load x3);
Applicable motors: Brushed DC motors;
Maximum load current: 4.5A;
Signal input: active low level (NPN);
Multiple working modes: 9 optional modes, including instantaneous, self-locking, etc.
Operating current (excluding motor): quiescent current: 4MA, forward or reverse operating current: 40MA
Pin description:
VCC: power supply +
GND: Power supply-
M+:Motor+
M-:Motor-
GND: Trigger signal-
K1: Forward input control
K2: Reverse input control
S1: Forward limit signal
S2: Reverse gear limit signal
VCC: power supply +
GND: Power supply-
M+:Motor+
M-:Motor-
GND: Trigger signal-
K1: Forward input control
K2: Reverse input control
S1: Forward limit signal
S2: Reverse gear limit signal
Technical description:
The module has 4 signal inputs, namely "K1", "K2", "S1" and "S2". K1 is the forward rotation signal input terminal, K2 is the reverse rotation signal input terminal, S2 is the forward rotation limit signal input terminal and S2 is the reverse limit signal input terminal. The signal input source can be selected from micro switch, induction, infrared, metal, remote control and other modules, or controlled by microcontroller.
The module has 4 signal inputs, namely "K1", "K2", "S1" and "S2". K1 is the forward rotation signal input terminal, K2 is the reverse rotation signal input terminal, S2 is the forward rotation limit signal input terminal and S2 is the reverse limit signal input terminal. The signal input source can be selected from micro switch, induction, infrared, metal, remote control and other modules, or controlled by microcontroller.
Operating mode description:
Mode 0 (default):
Self-locking mode, the signal only needs to be triggered once, the module is self-locking to keep running.
When the reverse signal is encountered during forward rotation, it should stop immediately for 0.3 seconds, then enter reverse rotation;
the limit signal has priority, when forward rotation is encountered, the forward limit signal will stop immediately;
Forward rotation cannot start when a forward rotation limit signal is present, and the same is true for reverse rotation;
the forward rotation signal and the reverse rotation signal are valid when a low level, i.e. a short-term 0V level (negative power supply), will be activated;
The limit signal is normally open; (for example, forward rotation cannot be started when the SW1 switch is closed or connected to a low level.)
Only one limit signal is valid at a time; for example, motor rotation cannot be stopped by inputting two limit signals at the same time during reverse rotation.
Mode 0 (default):
Self-locking mode, the signal only needs to be triggered once, the module is self-locking to keep running.
When the reverse signal is encountered during forward rotation, it should stop immediately for 0.3 seconds, then enter reverse rotation;
the limit signal has priority, when forward rotation is encountered, the forward limit signal will stop immediately;
Forward rotation cannot start when a forward rotation limit signal is present, and the same is true for reverse rotation;
the forward rotation signal and the reverse rotation signal are valid when a low level, i.e. a short-term 0V level (negative power supply), will be activated;
The limit signal is normally open; (for example, forward rotation cannot be started when the SW1 switch is closed or connected to a low level.)
Only one limit signal is valid at a time; for example, motor rotation cannot be stopped by inputting two limit signals at the same time during reverse rotation.
Mode 1:
The auto-start version of mode 0 adds the power-on auto-start function to mode 0, which means that forward rotation is automatically started every time the module is powered on. This version is more suitable as a motion module between two points, it will work automatically when the module is powered on.
The auto-start version of mode 0 adds the power-on auto-start function to mode 0, which means that forward rotation is automatically started every time the module is powered on. This version is more suitable as a motion module between two points, it will work automatically when the module is powered on.
Mode 2:
Transient mode. When forward rotation signal exists, the motor rotates forward; when reverse rotation signal exists, the motor reverses; when there is no forward rotation signal and reverse rotation signal, the motor stops; while forward rotation, if forward rotation limit exists, forward rotation will stop; during rotation, if reverse rotation limit signal exists, reverse rotation will stop. Removing the two restriction signals will not resume rotation, and the rotation signal needs to be input again to start forward and reverse rotation.
Transient mode. When forward rotation signal exists, the motor rotates forward; when reverse rotation signal exists, the motor reverses; when there is no forward rotation signal and reverse rotation signal, the motor stops; while forward rotation, if forward rotation limit exists, forward rotation will stop; during rotation, if reverse rotation limit signal exists, reverse rotation will stop. Removing the two restriction signals will not resume rotation, and the rotation signal needs to be input again to start forward and reverse rotation.
Mode 3:
The level drive mode is functionally similar to the H-bridge and operates according to the following logic:
When there is a forward rotation signal and no signal at the forward limit, it will rotate forward; when there is a reverse signal and no signal at the reverse limit, it will reverse; this version is pure logic type and is suitable for microcontroller signal input. Note the forward rotation priority, i.e. forward rotation is when both forward and reverse inputs satisfy the condition.
Note the real-time nature of the levels. For example, when there is a signal at both forward and reverse inputs, this is forward rotation. At this point, if the forward rotation signal is removed and the reverse rotation signal is retained, it will reverse. When the motor is rotating, the limit input is invalid and the motor cannot be stopped.
The level drive mode is functionally similar to the H-bridge and operates according to the following logic:
When there is a forward rotation signal and no signal at the forward limit, it will rotate forward; when there is a reverse signal and no signal at the reverse limit, it will reverse; this version is pure logic type and is suitable for microcontroller signal input. Note the forward rotation priority, i.e. forward rotation is when both forward and reverse inputs satisfy the condition.
Note the real-time nature of the levels. For example, when there is a signal at both forward and reverse inputs, this is forward rotation. At this point, if the forward rotation signal is removed and the reverse rotation signal is retained, it will reverse. When the motor is rotating, the limit input is invalid and the motor cannot be stopped.
Mode 4:
Start/Stop mode with the same function as mode 0, except for the following functional details:
If forward rotation has been started and forward rotation signal is input again, it will stop immediately; if reverse rotation has been started and reverse rotation signal is input again, it will stop immediately. For example, there is a forward signal >> immediate forward rotation; at this time, input forward rotation signal >> immediate stop forward rotation. Reverse rotation is the same.
Start/Stop mode with the same function as mode 0, except for the following functional details:
If forward rotation has been started and forward rotation signal is input again, it will stop immediately; if reverse rotation has been started and reverse rotation signal is input again, it will stop immediately. For example, there is a forward signal >> immediate forward rotation; at this time, input forward rotation signal >> immediate stop forward rotation. Reverse rotation is the same.
Mode 5:
The function is the same as mode 0, only the limit signal differs as follows:
The limit signal is valid only for the current time (frontier valid).
For example, after starting a forward rotation, it will stop when a forward limit signal is encountered. After stopping, it is still possible to start forward rotation by entering a forward rotation signal at this point, even though a forward limit signal is still entered. This specification is usually used when the one-way start and end points are on the same motion circle, for example, pressing once to form one circle and again to form another.
The function is the same as mode 0, only the limit signal differs as follows:
The limit signal is valid only for the current time (frontier valid).
For example, after starting a forward rotation, it will stop when a forward limit signal is encountered. After stopping, it is still possible to start forward rotation by entering a forward rotation signal at this point, even though a forward limit signal is still entered. This specification is usually used when the one-way start and end points are on the same motion circle, for example, pressing once to form one circle and again to form another.
Mode 6:
One-touch switching mode with the same function as mode 0, except that the activation method is different, as follows:
Forward rotation signal input, forward rotation after triggering, reverse rotation after triggering again, reverse rotation signal input is invalid. Input forward rotation signal once, start forward rotation, stop forward rotation when the forward limit has signal; input forward rotation signal again, start reverse rotation, and stop reverse rotation after the reverse rotation limit has signal
One-touch switching mode with the same function as mode 0, except that the activation method is different, as follows:
Forward rotation signal input, forward rotation after triggering, reverse rotation after triggering again, reverse rotation signal input is invalid. Input forward rotation signal once, start forward rotation, stop forward rotation when the forward limit has signal; input forward rotation signal again, start reverse rotation, and stop reverse rotation after the reverse rotation limit has signal
Package List:
1x Relay Module
1x Relay Module
- We accept PayPal only. But we only Accept your Ebay Address,Please Make sure it's 100% right.
- Payment must be received in 5 business days of auction closing.
- Please leave note for your special request (e.g. Colors or Size) in PayPal when you pay the order.
- Any special request cannot be accepted after 24 hours of payment, because most of orders will be processed instantly and same day dispatched.
- We maintain high standards of excellence and strive for 100% customer satisfaction! Feedback is very important to us. We request that you contact us immediately BEFORE you give us neutral or negative feedback, so that we can satisfactorily address your concerns.
- All package need to wait 30 days(US only need 7-10 days),Please take care it.Less than 30 days,we can't take a refund.
- If the item is defect when you receive it or you are not satisfied with it, please return it within 14 days for a replacement or money back. But the items must be back in factory condition. Please contact us and double check the return address before you return it.
- If is item is defective in 12 months, you can return it to us. We will send you a new replacement after receiving the defective item.