Description:
l High quality for professional use
l Lightweight and compact, do not affect the performance of your model
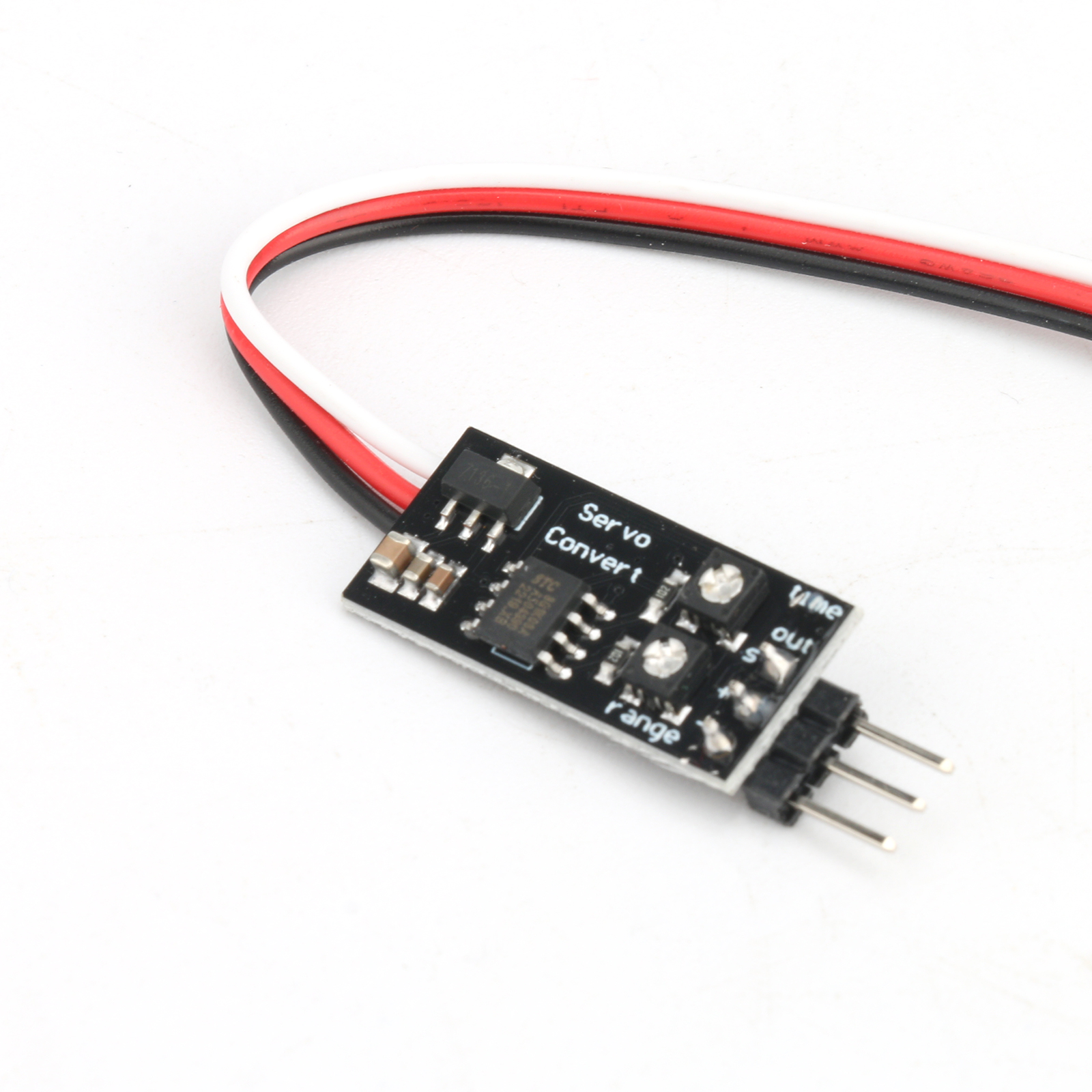
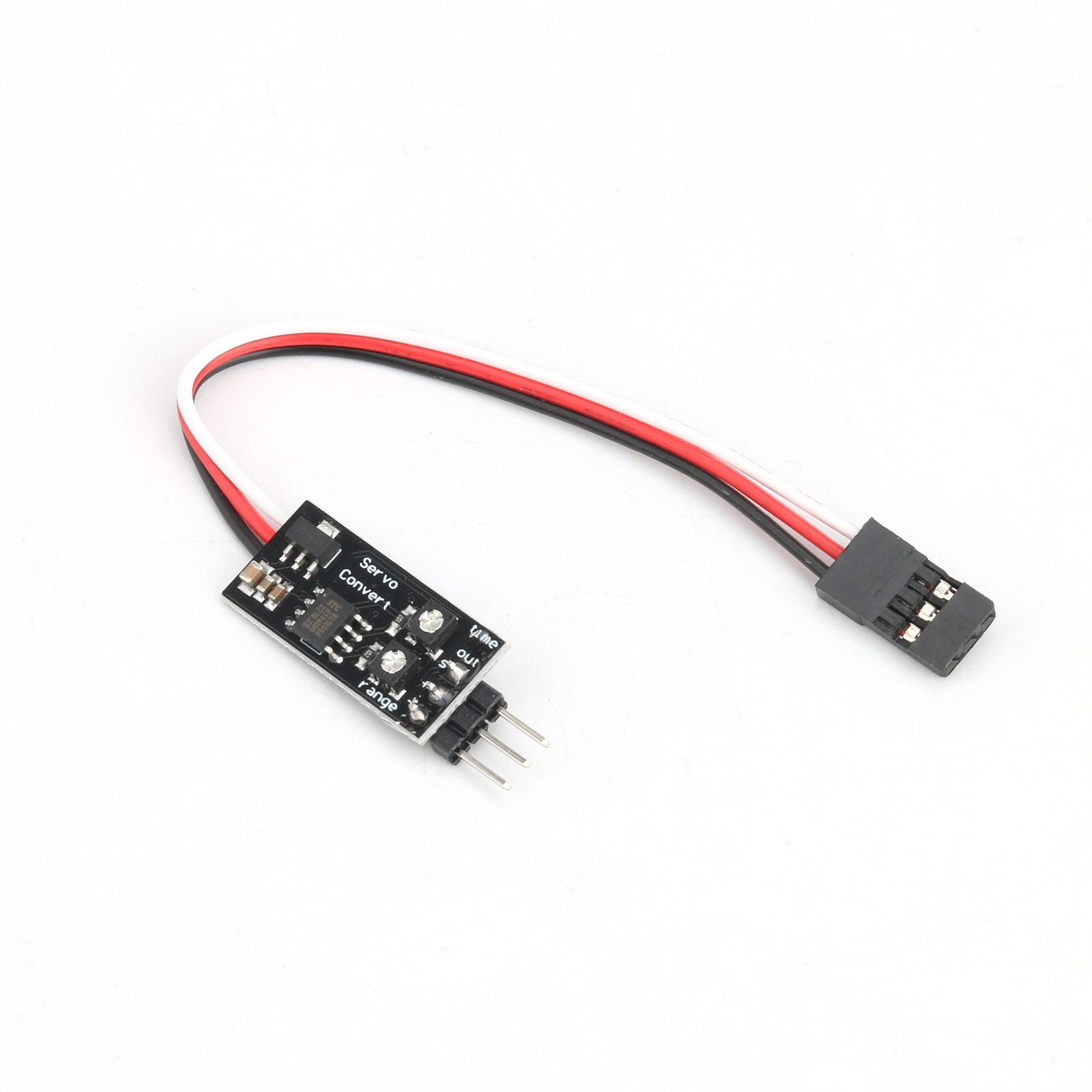
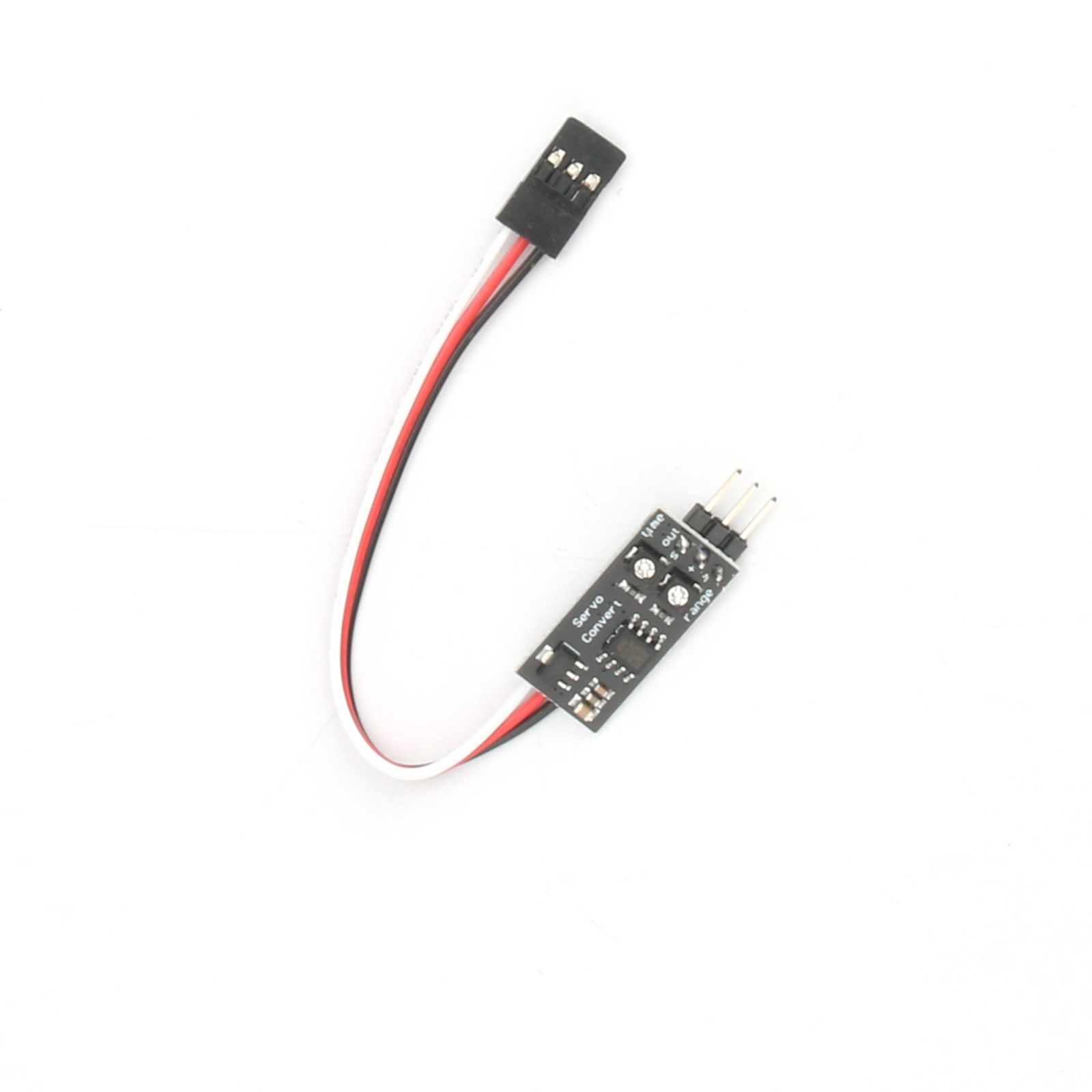
l 3P cable (length 10cm) and plug design, easy to use
l This advanced servo converter can adjust the positive and negative and the rudder angle
l Also increase the delay or slow execution function
Specification:
l Board size: Approx. 25x12mm
l Weight: About 2g
l Adaptable voltage: 3.6-16V (more than poked with high voltage servo)
l Output supply voltage = input supply voltage
l Output: General PWM servo signal
l Output signal frequency: 50Hz (if you give 300Hz signal as input, the output is also 50Hz. Generally, the remote control output servo signal is 50Hz, high frequency is used in special occasions)
l Applicable servos should support 500-2500us 180 degree turn servos (most servos support 180 degrees, if the servo does not support (for example only supports 800-2200us), be careful when adjusting the steering angle. If the signal exceeds the range, the steering gear may be damaged. In addition, some servos are close to 180 degrees, so be careful when adjusting to the maximum)
The difference between delay and slow speed:
l Delay: The servo does not move. After the delay time, it will execute immediately. (Maximum delay 4 seconds (the knob is full))
l Slow speed: The servo executes immediately, according to the set slow speed. (The speed can be slow enough to turn 180 degrees to take more than 20 seconds)
l The knob is adjusted to the minimum, which can remove the function of delay or slow speed. The device is only used as a positive and negative and rudder angle controller.
Steps for usage:
l Turn the time knob to the minimum to remove the delay function (turn it counterclockwise)
l Insert the converter between the receiver and the steering gear
l Adjust the range knob and operate the remote control at the same time to confirm the front and back of the servo and the size of the rudder angle
l Then increase the time knob to increase the delay
Package:
l 1x Converter
Note:
l Some servos meet the limit plate before it reaches 180 degrees. Do not force the motor to stall.
l After the analog servo is powered on, it may vibrate when there is no signal