Package include:1 x Closed Loop Stepper Driver 0-8.2A 24-80VDC for Nema 34 Stepper Motor CL86T V4.1
1 x Nema 34 Closed Loop Stepper Motor 4.8Nm(679.87oz.in) Encoder 1000CPR 1 x 1.7m Long Encoder Extension Cable for Closed Loop Stepper Driver 1 x RV-4 AWG18 1.7m Long Motor Extension Cable with GX16 Aviation Plug 1 x RS232 Debugging Cable
1 x 350W 60V 5.9A 115/230V Switching Power Supply Motor SpecificationPart Number: 34HS31-6004D-E1000
Number of phase: 2
Holding Torque: 4.8Nm(679.87oz.in)
Rated Current/phase: 6 A
Phase Resistance: 0.42ohms± 10%
Inductance: 3.5mH ± 20%(1KHz)
Frame Size: 86 x 86mm
Body Length: 96.5mm
Shaft Diameter: 14mm
Shaft Length: 37mm
Keyway Shaft Length: 25mm
Lead Length: 300mm
Encoder SpecificationOutput Circuit Type: Differential type
Encoder Resolution: 1000 Output Signal Channels: 3 channels Supply Voltage Min: 4.5V Supply Voltage Max: 5.5V Output Current: 100mA MAX Output High Voltage: ≥Vcc-0.4V Output Low Voltage: ≤0.4V Output Frequency Max: 1.85MHZ Motot and Encoder Connection
Motor Extension Cable Connection
Or
Encoder Extension Cable Connection
Driver Specification CL86T V4.1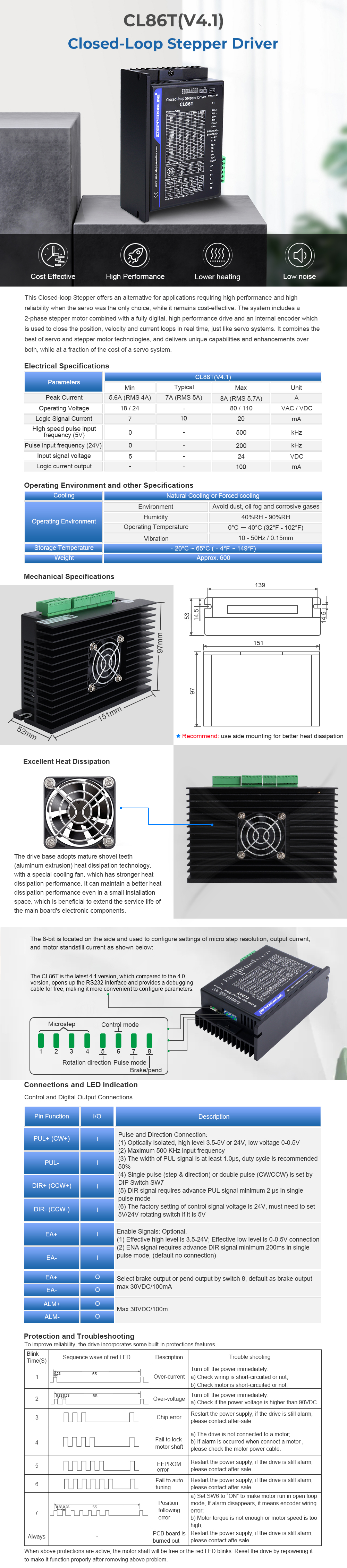 350W 60V 5.9A 115/230V Switching Power Supply
 Key Features
60V DC 5.9A output AC input voltage range: 93~132V/176~264VAC 115V/230V AC selected by switch High efficiency low cost Forced air cooling by built-in DC fan Low output ripple and yawp Over current, over voltage, short circuit and overheat protections 215*115*50mm (L*W*H) Questions & Answers
1. What size is the motor shaft
14mm dia with a 5mm key
2.What the maximum RPM is?
maximum rpm is 2000rpm 3.The motor do not turn when the pulse input
1.Whether the pulse input of the driver is connected stably 2.Whether the input way in the system configuration of the driver is pulse input 3.Whether the motor can be released 4.Power LED does not light after power
1.Check the connection of the power line. 2.the voltage maybe too low 5.Red light warning
1.check the connection of the motor with power 2.input voltage of the driver maybe too low or too high 6.Red light alarm after running a small angle
1.Whether the phase wire of the motor is correctly connected. If it is not correct, please refer to the motor phase and the corresponding phase sequence of the driver. 2.In the driver configuration parameters, whether the number of motor encoder lines is consistent with the connected motor parameters. If they are different, you need to reset them. 3.Whether the pulse input speed is greater than the rated speed of the motor
Why StepperOnline ?
|
