Descriptions:
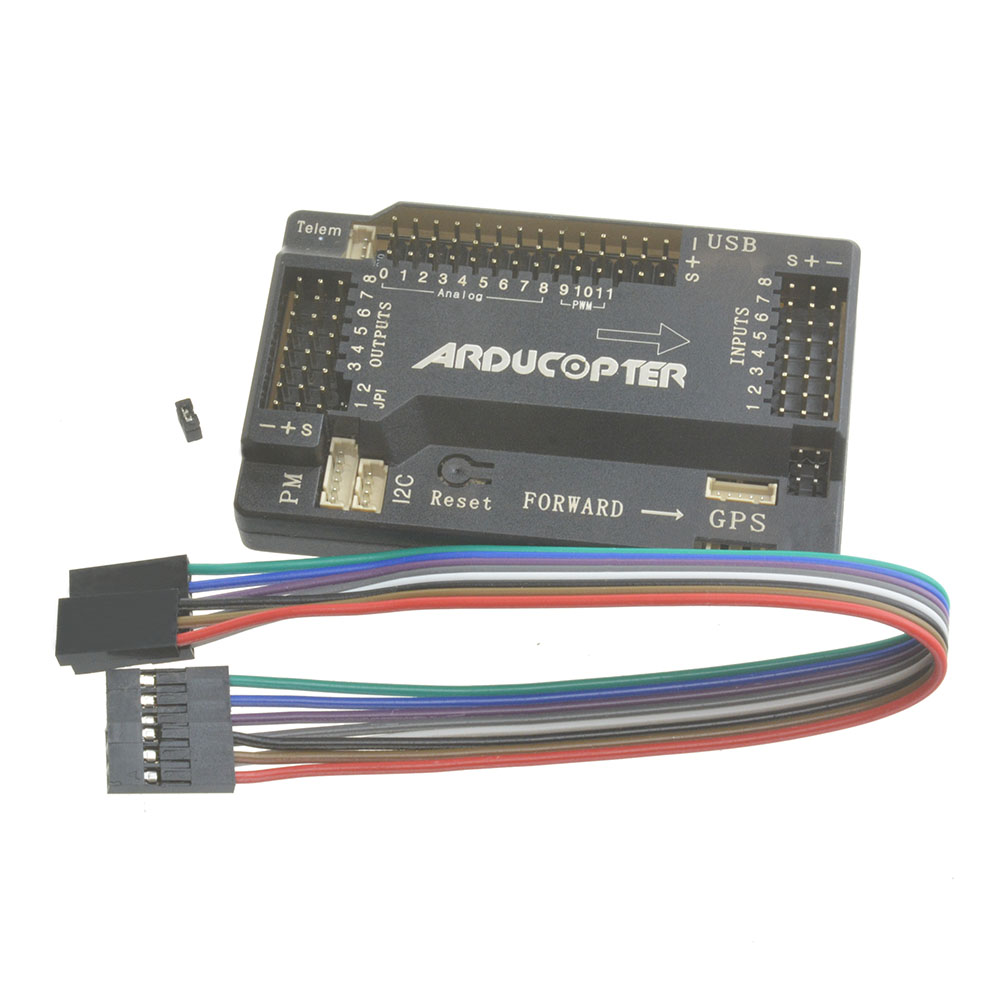
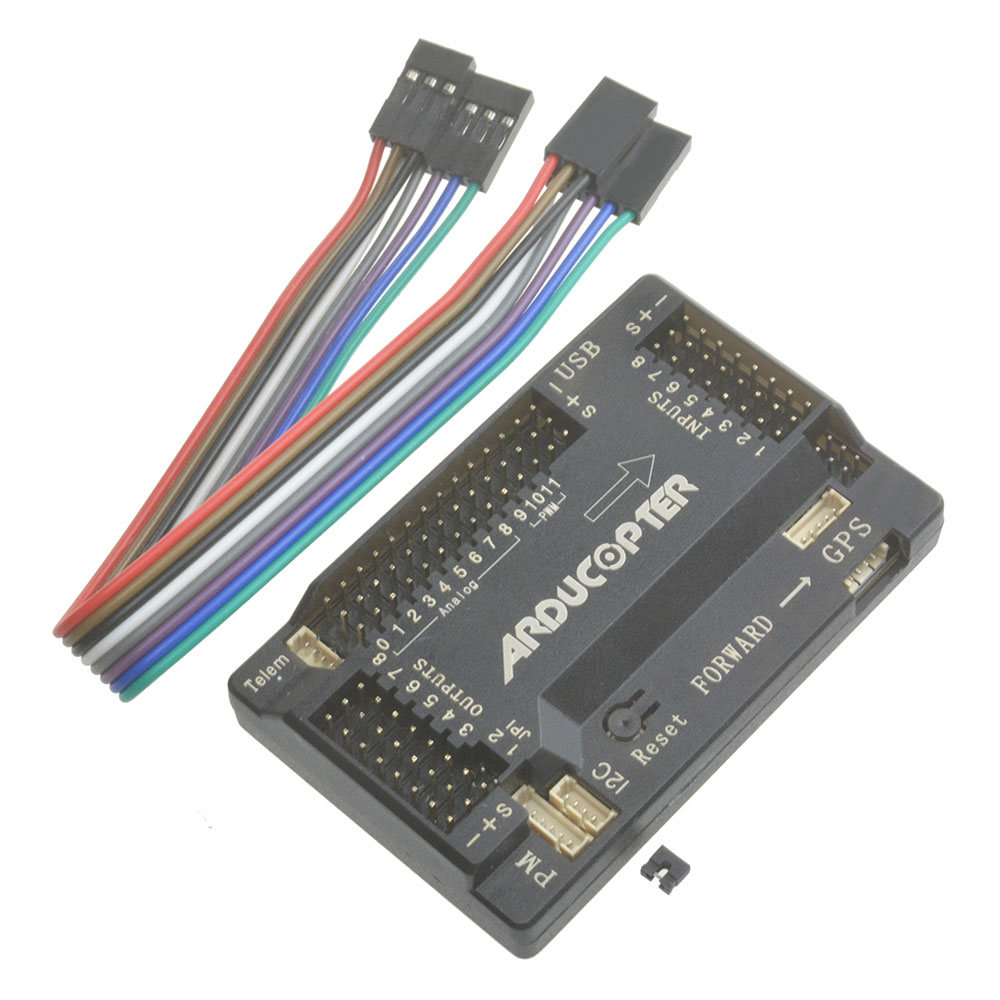
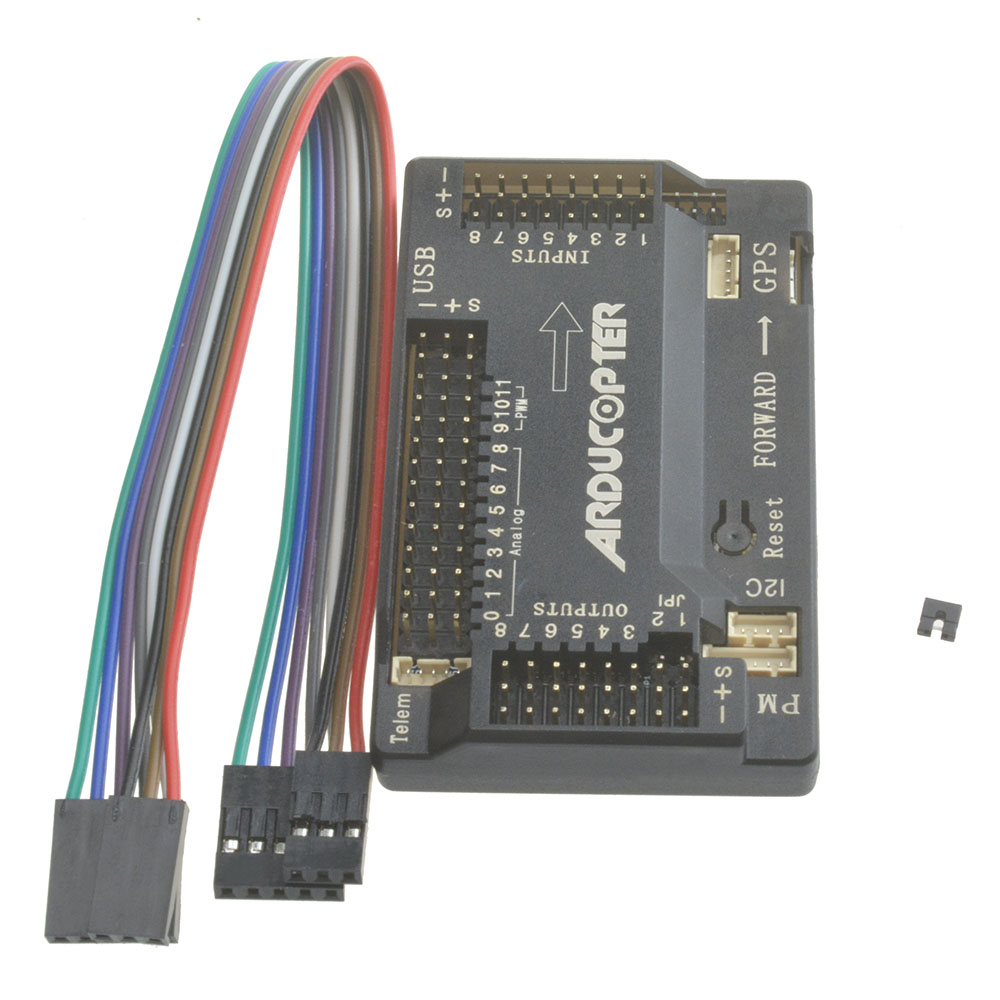
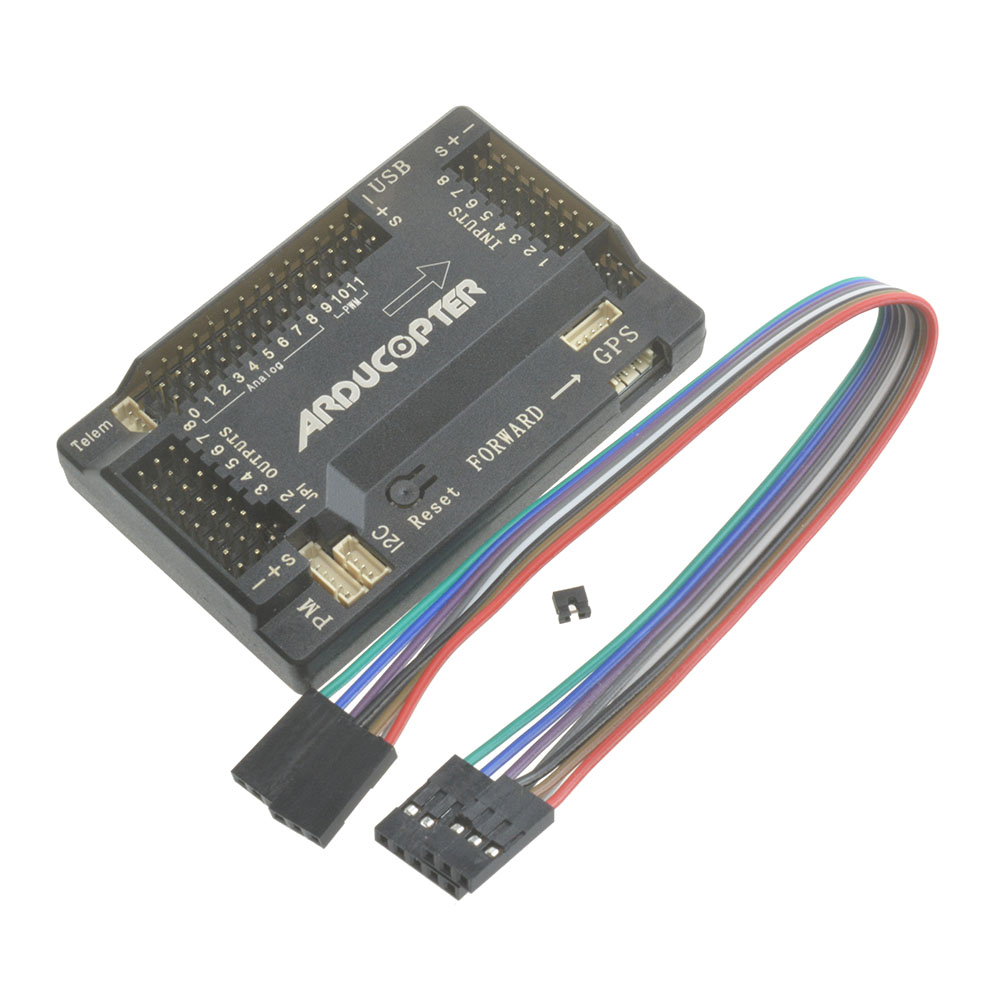
The ArduPilot Mega 2.6 is a complete open source autopilot system and the bestselling technology that won the prestigious 2012 Outback Challenge UAV competition. This version is ready to use, with no assembly required. It allows the user to turn any fixed, rotary wing or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints.
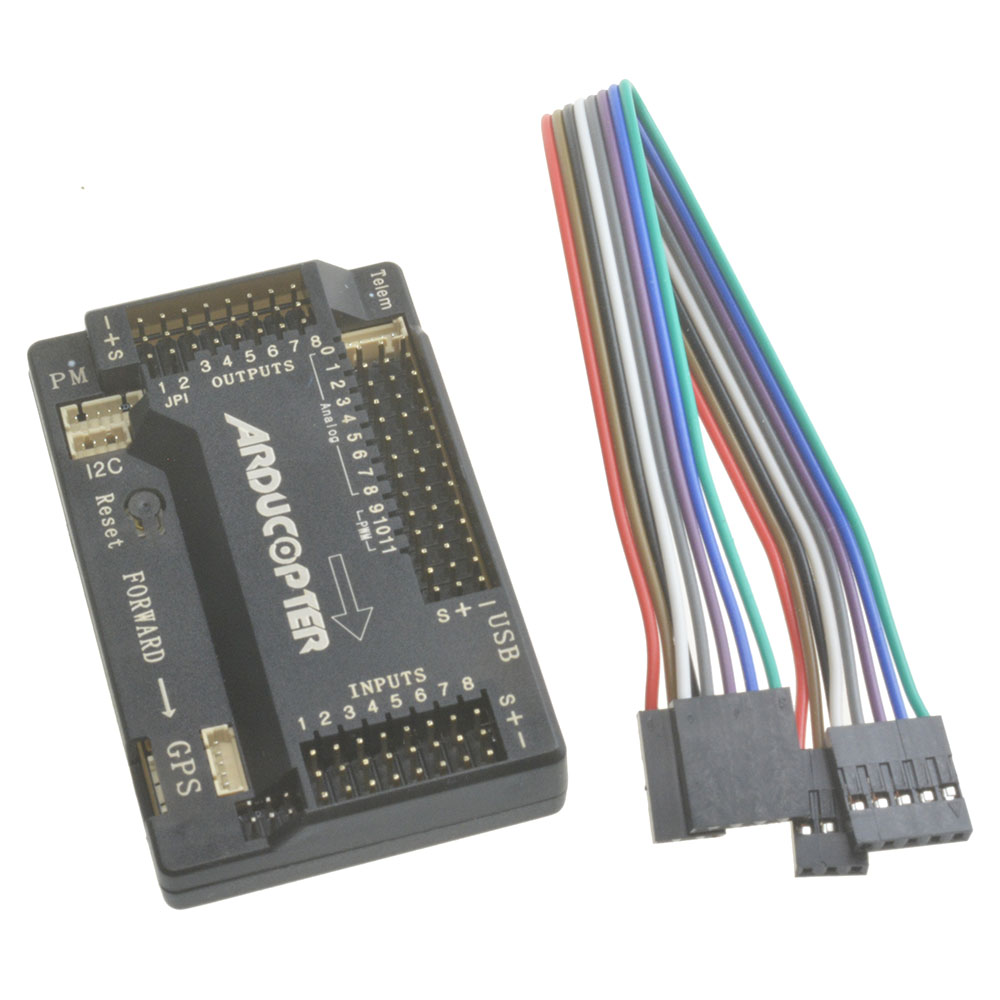
This revision of the board has no onboard compass, which is designed for vehicles (especially multicopters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. (On fixed wing aircraft it's often easier to mount APM far enough away from the motors and ESCs to avoid magnetic interference, so this is not as critical, but APM 2.6 gives more flexibility in that positioning and is a good choice for them, too). This is designed to be used with the 3DR uBlox GPS with Compass (see option below), so that the GPS/Compass unit can be mounted further from noise sources than APM itself.
APM 2.6 requires a GPS unit and external compass for full autonomy. Choose your compass from options menu at right.
Features:
Arduino Compatible!
Comes pre-soldered (with straight pins) and tested.
Includes 3-axis gyro, accelerometer along with a high-performance barometer
External Compass (Optional)
Onboard 4 MP Dataflash chip for automatic datalogging
Optional off-board GPS, uBlox NEO6 (select GPS option from options)
One of the first open source autopilot systems to use Invensense's 6 DoF Accelerometer/Gyro MPU-6000.
Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
Note: The Power Module is only designed to power APM, a RC receiver and APM accessories (GPS, Telemetry radio). It is not designed to power servos. Use your aircraft's own ESC/BEC for that.
APM 2.5 / 2.6 Installation Considerations
Power Supply
Before using rigorous testing voltage is below the calibration range, there is the possibility of burning or otherwise unable to work properly.
1, the use of electric power transfer: the need to JP1 jumper plug, power supply voltage does not exceed 5.6V, not less than five
2, using UEBC: The UEBC power output cable plugged into the receiver INPUTS port, power supply is not higher than 5.2 is not lower than 4.8V
3 Do not pull out or insert hot plug devices into any equipment APM, disconnect power before.
Note the use of data transmission:
Use CUAV 3DR and XBEE data transmission, because the APM will automatically detect the USB port for data port switch, so the plug in the USB, the data link will automatically switch to USB, and therefore the use of data transmission tests, you must disconnect the USB, use a separate power supply USB power supply can not be used to test the connection. When using the data transmission connection, the baud rate is 57600, 115200 ground stations using the USB connection, the port number can view the computer settings manager, APM port will display font with 2560.
Flight Control installation:
APM box above the arrow pointing to the aircraft nose pointing, pointing installed in strict accordance with
Specific multi-rotor and fixed-wing, harness wiring diagram can view the novice or WIKI
Apm can use double-sided tape for installation, if the aircraft is too large to be carried damping vibrations, if the wind blows more easily installed on the flight control areas, such as propeller below, use the sponge to cover barometer
GPS Installation:
Apm2.5 the GPS is not installed the required direction. GPS antenna must face up.
Apm2.6 of GPS as a built-in electronic compass, so the direction of the very serious request.
Because the presence of carbon fiber rods tolerance, if the distribution of carbon fiber rods into the brackets are loose, use 502 or other strong glue to fill the gap fixed
Apm2.6GPS installation point lead tail on the tail, and then strictly correspond to the parallel
installation APM
2.6 The GPS will have two plug wire, 4PIN cord into GPS interface, 2P cable into the I2C interface
Apm2.6 ground station set up electronic compass selection
INTIAL SETUP-COMPASS-External Compas
Package included:
1x APM 2.6 Flight Controller Board For Multicopter ARDUPILOT MEGA 2.6 Version APM