Description
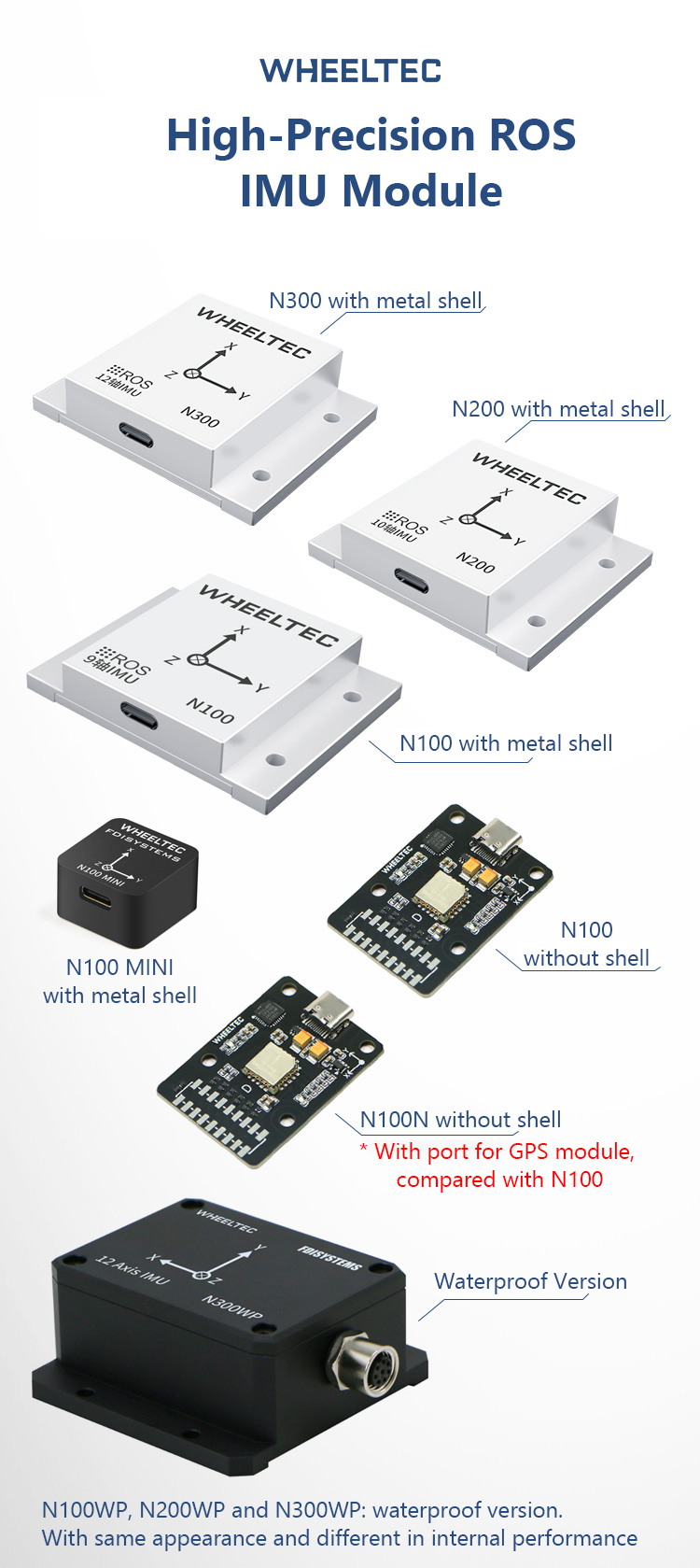
WHEELTEC 9-Axis IMU Module Inertial Measurement Unit FDISYSTEMS AHRS Gyro MEMS N100 without Shell
Features:
- High-precision 9-axis IMU module
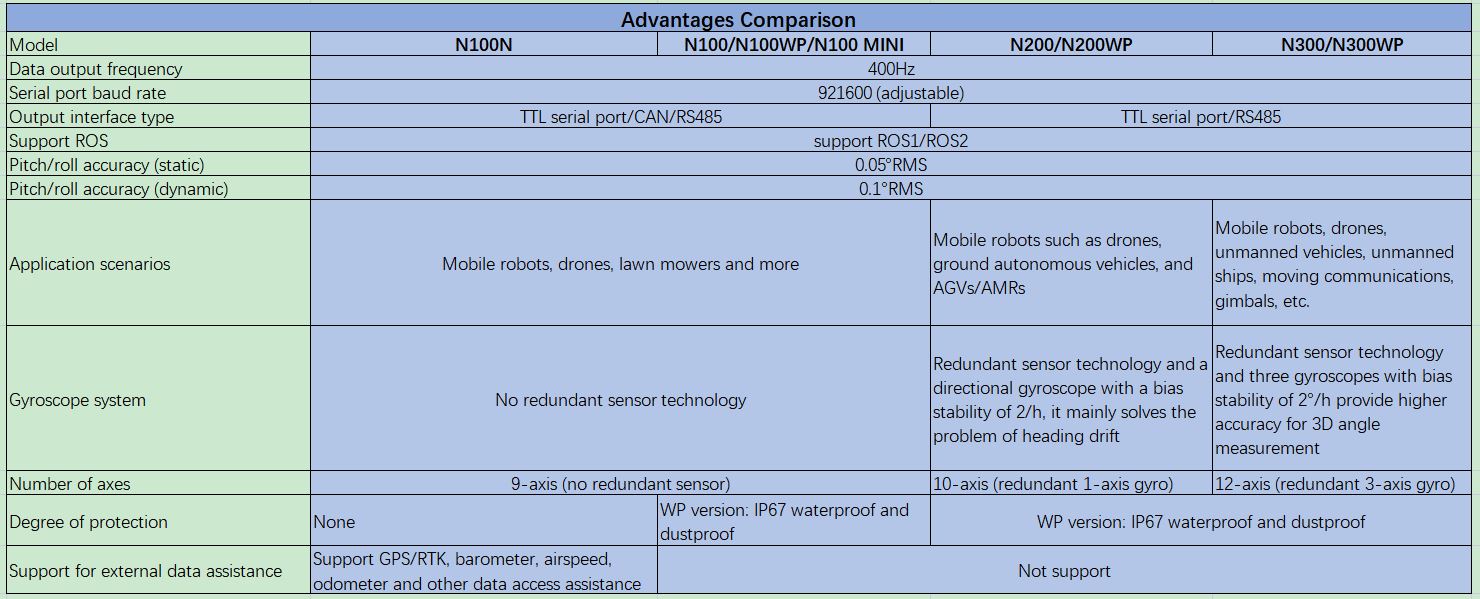
- High-precision ROS IMU module is comparable to advanced IMU modules, with 400Hz output frequency
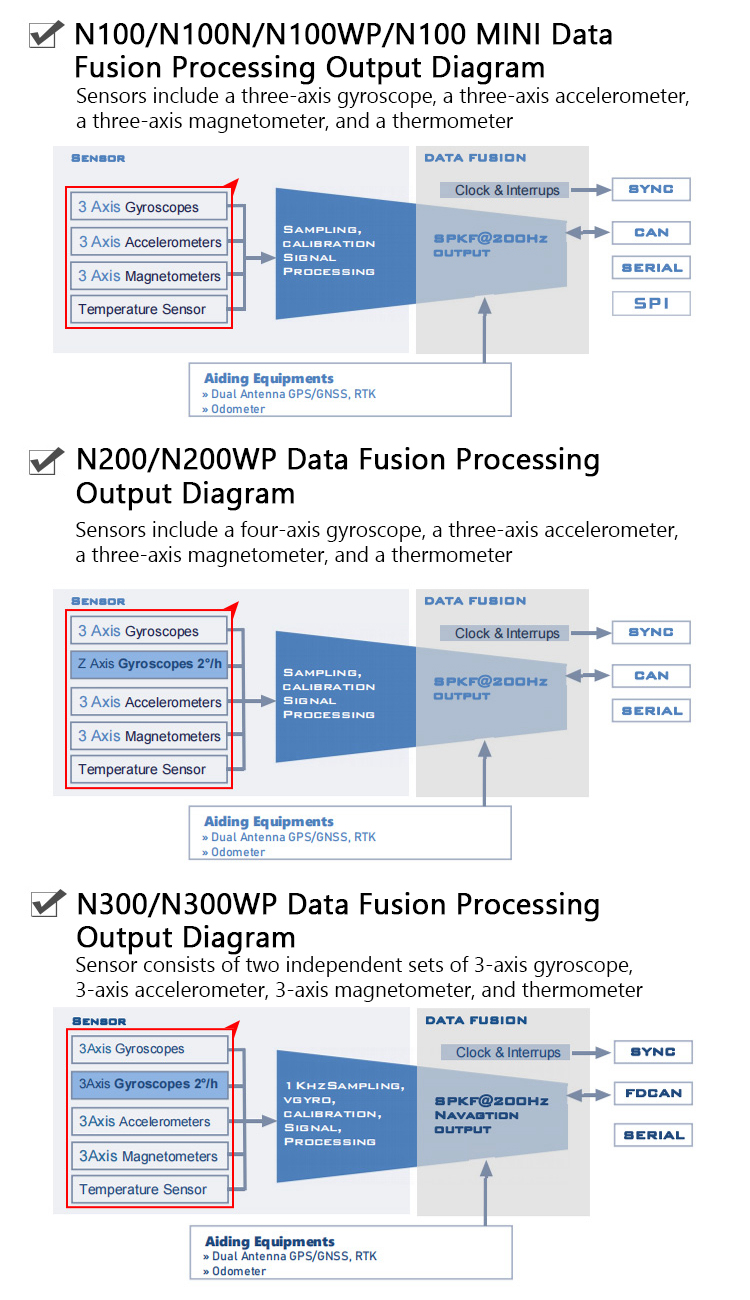
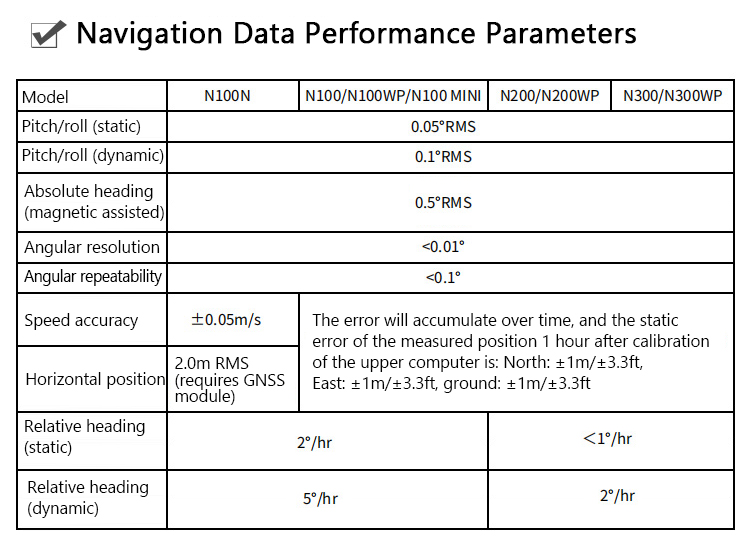
- Multi-axis redundant gyroscope; dynamic angular accuracy 0.1°RMS; resistance to magnetic interference; Kalman fusion algorithm; 400HZ data output frequency; support CAN/RS485 communication; support TTL communication; provide a host computer for Windows; support ROS1/ROS2; Provide STM32 & solution routines for Arduino
- Rich data output: triaxial acceleration, three-axis gyroscope, triaxial magnetometer, three-axis Euler angle, quaternion, directional cosine matrix, velocity, and location
- Ultra-high frequency data output: The sensor raw data output frequency is 400Hz: three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer data. Fusion calculation navigation data output frequency 200Hz: Euler angle, quaternion, directional cosine matrix, position (combined with GNSS), and speed
- Compatible with ROS1 and ROS2 systems: IMU data output frequency up to 400HZ, navigation data output frequency up to 200HZ, providing C/C++ data protocol, ROS1 and ROS2 function packages and tutorials. Quick and easy to get started
- The whole series supports TTL serial communication output. Its TTL serial port can be connected to an external module to convert to RS485 output. N100/N100N/N100WP/N100 MINI supports CAN communication output
- Its type C interface supports both forward and reverse plugging. It can withstand 10,000 repeated plugging and unplugging
- Pin header can be used for TTL and CAN communication
Overall Parameters:
- Input voltage: 5V
- Operating current: < 40mA
- Baud rate: 921600
- Default interface encapsulation: Type C
- Reserved interfaces: TTL/485 and CAN (for N100/N100N)
- Data protocols: FDILink Binary, FDILink ASCII, and NMEA
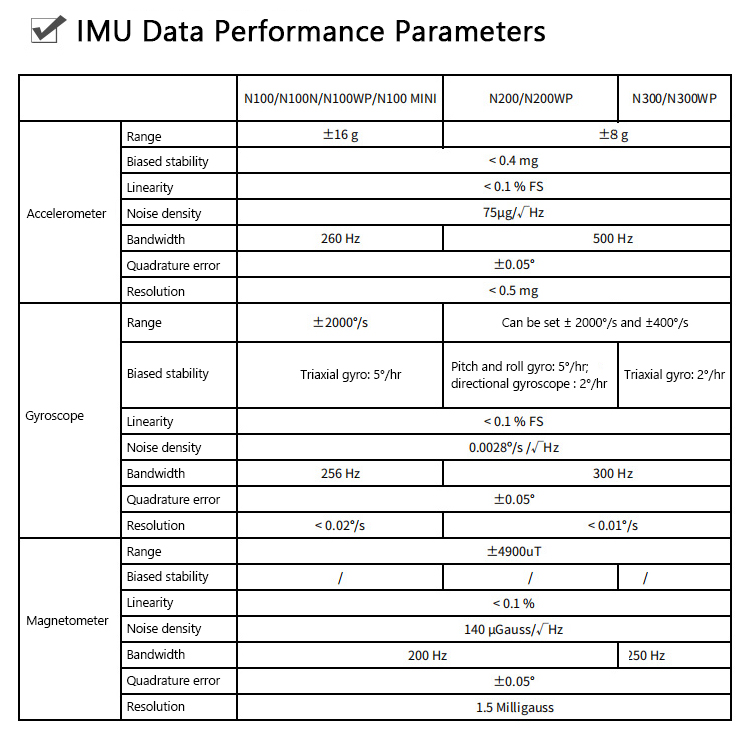
- IMU data output frequency: data content (acceleration, angular velocity, magnetic field vector); Output frequency: 400HZ
- Navigation data output frequency: data content: Euler angle (Yaw, Pitch, Roll), quaternion, directional cosine matrix, speed, position; output frequency: 200HZ
- Built-in fusion engine: adaptive nonlinear Sigma-point Kalman filter; User-configurable online estimation of auxiliary observation source parameters; Isolation of wild values and anomaly detection; Adaptive filtering
- Command configuration function: Support serial command configuration: restart, calibration, mode switching, etc
- Operating temperature: -40°C to +85°C
Functions:
- Provide a powerful upper computer: The powerful and user-friendly GUI supports online parameter modification (power-down saving), calibration, data LOG and display
- Examples of ROS application scenarios: It can output IMU, navigation data topics, and support attitude visualization
- Support for MATLAB to collect data directly: The routine (for Matlab) outputs 9-axis raw data, filtered position, speed, attitude, timestamp and other data, which can be used for SCOPE observation and related secondary development
- Support Python to collect data directly. Output 9-axis raw data, filtered position, speed, attitude, timestamp and other data, which can be used for related secondary development
- STM32 solution routines are provided. Supports output of 9-axis raw data, filtered angle, speed, quaternion, and timestamp
- Provide solution routines for Arduino. Supports output of 9-axis raw data, angular velocity, angle, quaternion and timestamp. Data is output directly on the ArduinolDE's serial monitor, which can be used after simple wiring
- Application: Industrial automation, quad-copters, service robots, and military scenarios
Package Included:
- 1 x N100 without Shell
- 1 x USB Cable
- 1 x Pin Header
Features:
- High-precision 9-axis IMU module
- High-precision ROS IMU module is comparable to advanced IMU modules, with 400Hz output frequency
- Multi-axis redundant gyroscope; dynamic angular accuracy 0.1°RMS; resistance to magnetic interference; Kalman fusion algorithm; 400HZ data output frequency; support CAN/RS485 communication; support TTL communication; provide a host computer for Windows; support ROS1/ROS2; Provide STM32 & solution routines for Arduino
- Rich data output: triaxial acceleration, three-axis gyroscope, triaxial magnetometer, three-axis Euler angle, quaternion, directional cosine matrix, velocity, and location
- Ultra-high frequency data output: The sensor raw data output frequency is 400Hz: three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer data. Fusion calculation navigation data output frequency 200Hz: Euler angle, quaternion, directional cosine matrix, position (combined with GNSS), and speed
- Compatible with ROS1 and ROS2 systems: IMU data output frequency up to 400HZ, navigation data output frequency up to 200HZ, providing C/C++ data protocol, ROS1 and ROS2 function packages and tutorials. Quick and easy to get started
- The whole series supports TTL serial communication output. Its TTL serial port can be connected to an external module to convert to RS485 output. N100/N100N/N100WP/N100 MINI supports CAN communication output
- Its type C interface supports both forward and reverse plugging. It can withstand 10,000 repeated plugging and unplugging
- Pin header can be used for TTL and CAN communication
Overall Parameters:
- Input voltage: 5V
- Operating current: < 40mA
- Baud rate: 921600
- Default interface encapsulation: Type C
- Reserved interfaces: TTL/485 and CAN (for N100/N100N)
- Data protocols: FDILink Binary, FDILink ASCII, and NMEA
- IMU data output frequency: data content (acceleration, angular velocity, magnetic field vector); Output frequency: 400HZ
- Navigation data output frequency: data content: Euler angle (Yaw, Pitch, Roll), quaternion, directional cosine matrix, speed, position; output frequency: 200HZ
- Built-in fusion engine: adaptive nonlinear Sigma-point Kalman filter; User-configurable online estimation of auxiliary observation source parameters; Isolation of wild values and anomaly detection; Adaptive filtering
- Command configuration function: Support serial command configuration: restart, calibration, mode switching, etc
- Operating temperature: -40°C to +85°C
Functions:
- Provide a powerful upper computer: The powerful and user-friendly GUI supports online parameter modification (power-down saving), calibration, data LOG and display
- Examples of ROS application scenarios: It can output IMU, navigation data topics, and support attitude visualization
- Support for MATLAB to collect data directly: The routine (for Matlab) outputs 9-axis raw data, filtered position, speed, attitude, timestamp and other data, which can be used for SCOPE observation and related secondary development
- Support Python to collect data directly. Output 9-axis raw data, filtered position, speed, attitude, timestamp and other data, which can be used for related secondary development
- STM32 solution routines are provided. Supports output of 9-axis raw data, filtered angle, speed, quaternion, and timestamp
- Provide solution routines for Arduino. Supports output of 9-axis raw data, angular velocity, angle, quaternion and timestamp. Data is output directly on the ArduinolDE's serial monitor, which can be used after simple wiring
- Application: Industrial automation, quad-copters, service robots, and military scenarios
Package Included:
- 1 x N100 without Shell
- 1 x USB Cable
- 1 x Pin Header
Note:
- CAN interface needs to be connected to the CAN level conversion module before using.
- RS485 interface of the non-WP (non-waterproof version) needs to be connected to the 485 level conversion module to be used.
Payment Terms
1. We accept PayPal,Payoneer,Visa Card,Google pay,Credit card etc.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
Shipping Terms
1. We will process the order within the handling time ,if you have any questions, please contact us via eBay message or email.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
Return Terms
If you receive the item that not satisfied or defective, please do not open case and kindly notify us within 30 days. We will guide you the returning process for replacement or refund.
Custom Duties & Taxes
1. It is buyer's responsibility to cover the import duties, taxes.We do not charge any taxes and fees, and the possible taxes and fees will be collected by the platform or by third parties such as customs and carriers.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
Feedback
1. Please kindly leave us a positive feedback and 5 star DSR if you satisfied with our product and service. Please feel free to contact us firstly if you have any problem with your order, we are responsible and credible seller and will solve the issue it for you asap.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.
