Description
3-Axis 5KG Industrial Robot Arm 86+57+57+42 Hybrid Servo Mechanical Arm Support Square/Arc Motion AC220V/110V
Description:
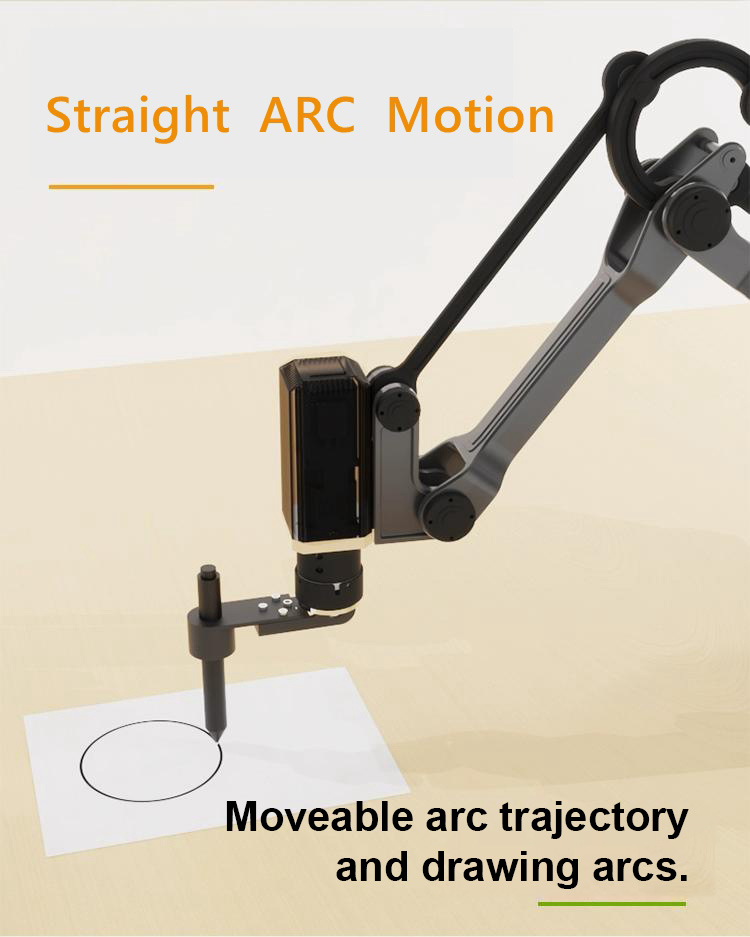
- This mechanical arm is an 86+57+57+42 hybrid servo robotic arm with an open bottom open motion control serial communication protocol. It is easy to use for secondary development of user equipment. It can be used for industrial handling, palletizing, loading and unloading, and small spraying. It can support point to point, point to line, line to line, and so on, walking in an arc, DO output, DI input, including world coordinates, that is, it can go straight up and down.
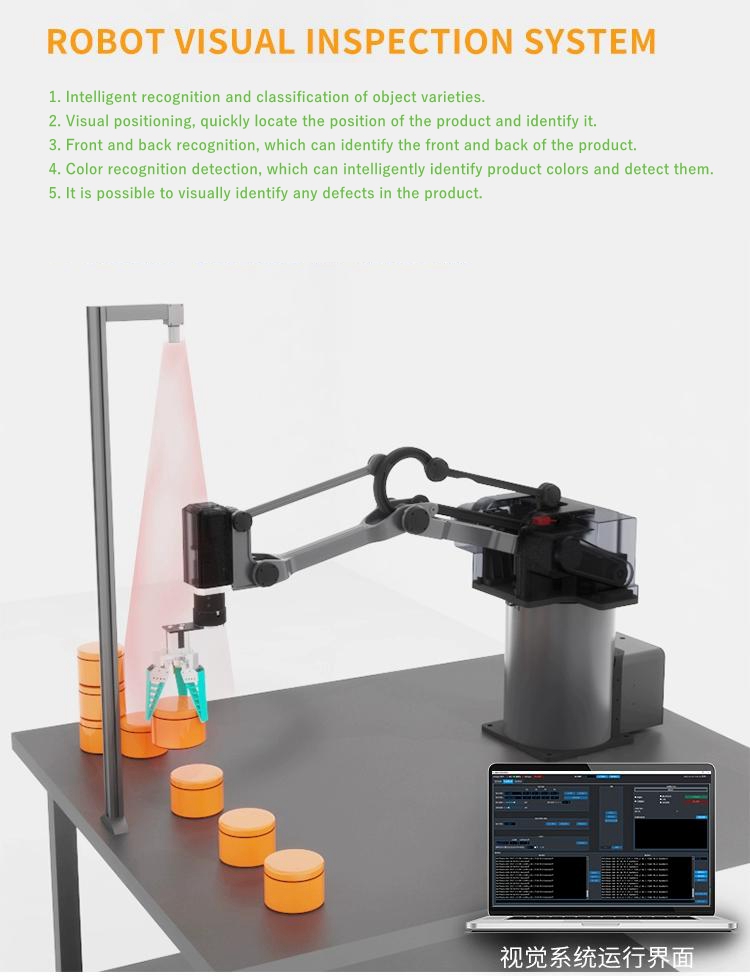
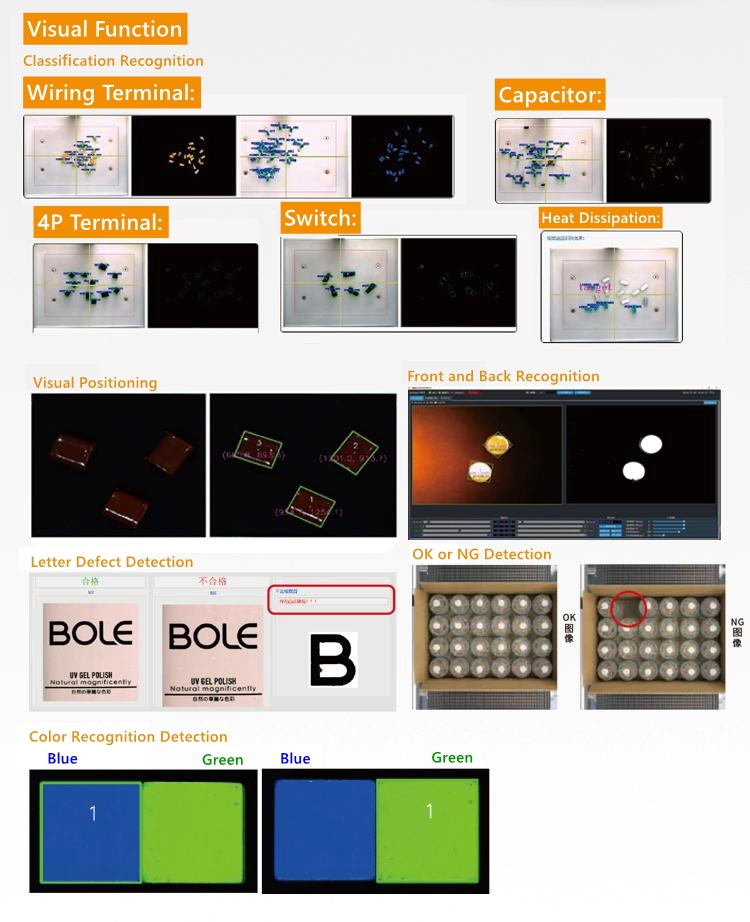
- The control protocol can also support for OPENMV, USB and other cameras to develop visual scenes, interact visually, identify object sizes and positions for transportation (requiring self-developed upper computer), and connect external devices, which can be used for small-scale industrial production.
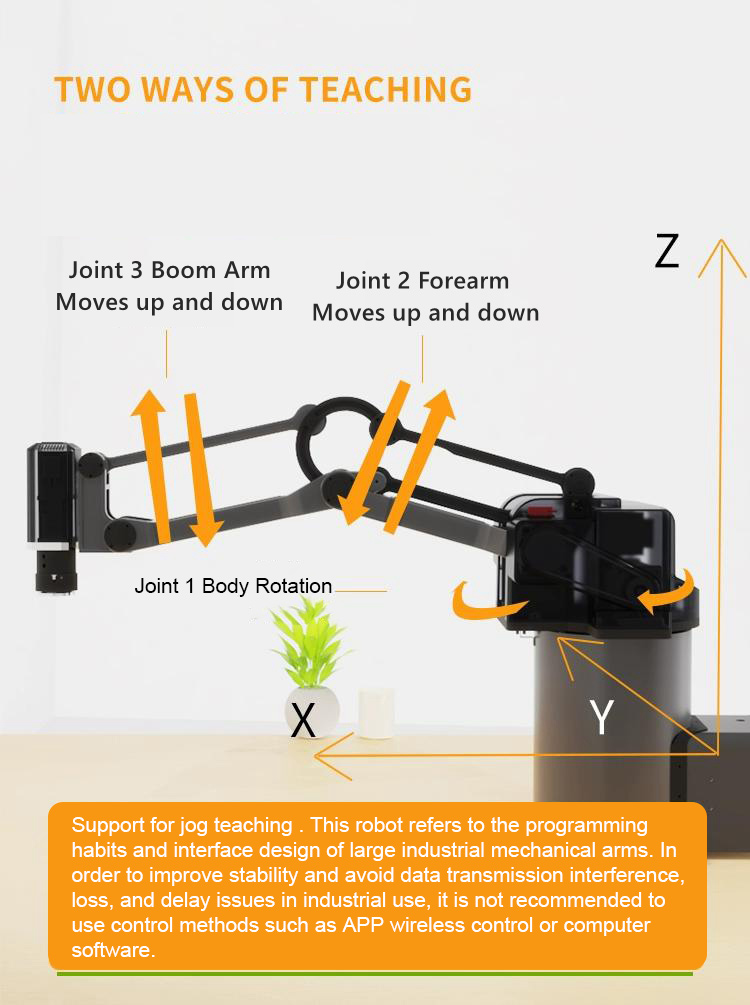
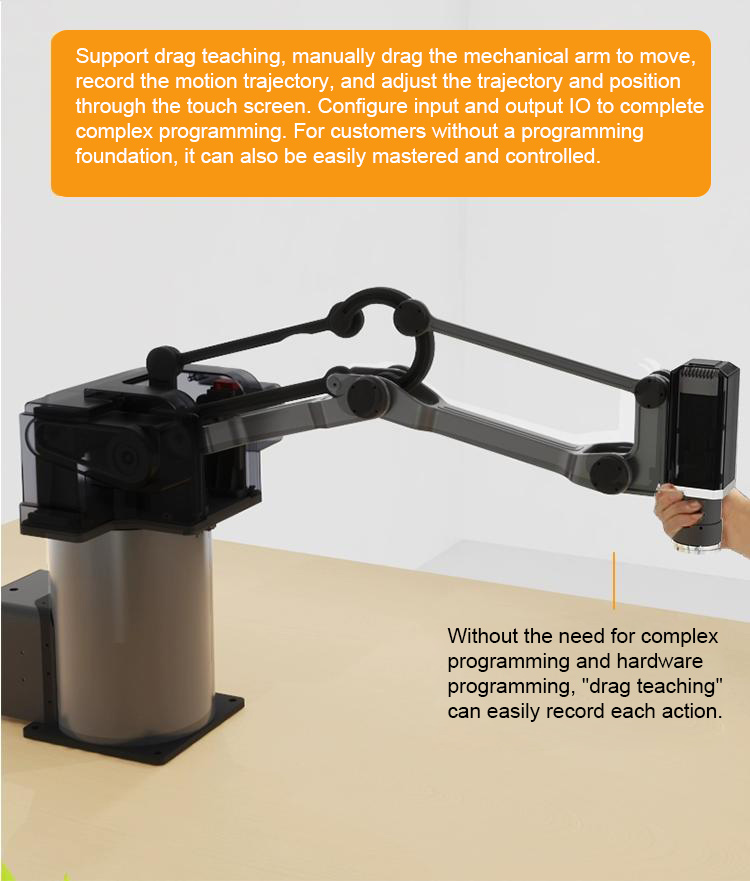
- This mechanical arm is also equipped with an operation teaching device, which is simple to operate and fast for beginners. The teaching device supports jog teaching and drag teaching. Supports three major user formulas and three independent programs, with a programmable number of 50 points per program. The maximum load of the mechanical arm can reach 5KG.
The functional instructions of the mechanical arm are as follows:
- Mechanical arm zero calibration protocol instruction
- Mechanical arm stop protocol instruction
- Mechanical control chassis protocol instruction
- Protocol instruction for mechanical arm control boom arm motor
- Protocol instruction for mechanical arm control forearm motor
- Air pump switch protocol instruction
- Hand grab switch protocol instruction
- Obtain current world coordinates (mechanical arm) protocol instruction
- Obtain the current angle (mechanical arm) protocol instruction
- Obtain the current input step (mechanical arm) protocol instruction
- Clear program protocol instructions
- Control routing protocol instruction
- Control straight line protocol instruction
- Control arc protocol instruction
- Control DI DO protocol instruction
- Control hand grab protocol instruction
- Control air pump protocol instruction
- Provide mechanical control serial communication protocol
Specification:
- Model: ZKBOT-4086A
- Payload: 5KG
- Position repeat accuracy: +/-0.05mm
- Max speed:
1-axis (bottom rotation): 140 degree/S
2-axis (boom rotation): 120 degree/S
3-axis (forearm rotation): 100 degree/S
4-axis (terminal gyration): 160 degree/S
- Max operating area:
1-axis (bottom rotation): -162 ~ 162 degree
2-axis (boom rotation): -115 ~ 0 degree
3-axis (forearm rotation): -115 ~ 0 degree
4-axis (terminal gyration): -162 ~ 162 degree
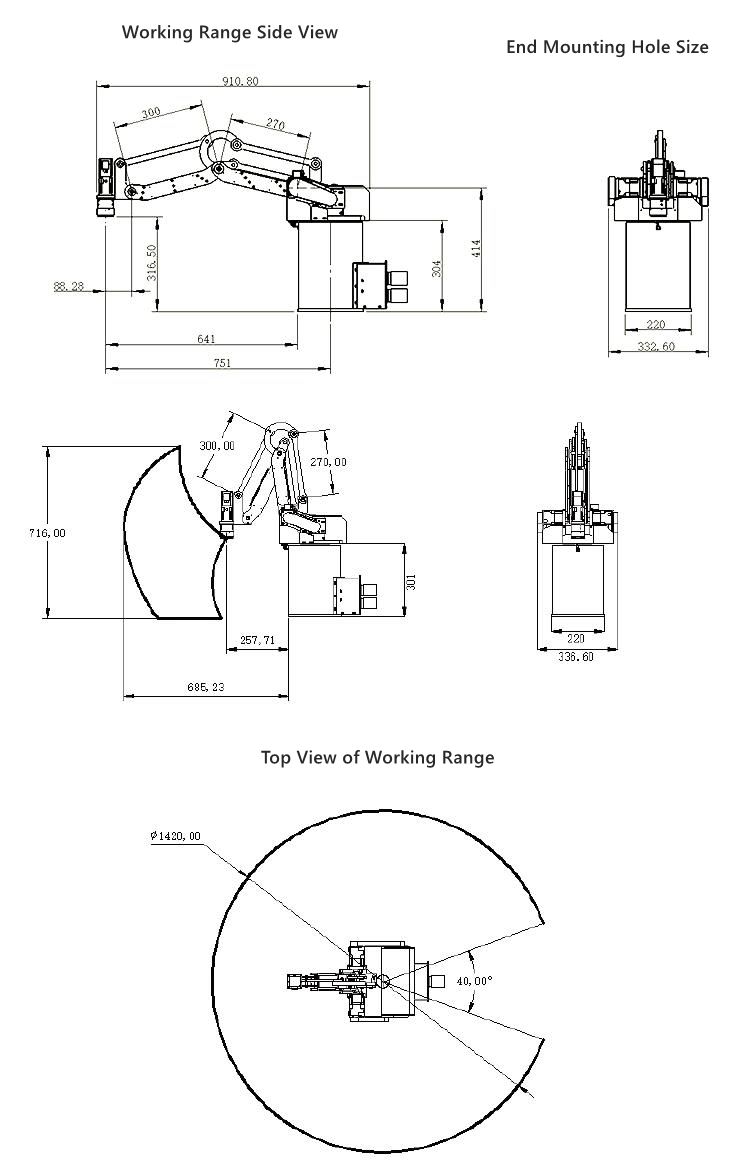
- Maximum reach: 710mm
- Working temperature: -10 ~ 50 Celsius degree
- Working voltage: AC 220V/110V
- Power consumption: 100W
- Robot weight: 37kg
- Control mode: teach pendant + drag teaching
- Drive configuration: 86+57+57+42 hybrid servo + high precision helical gear reducer + 3-axis brake
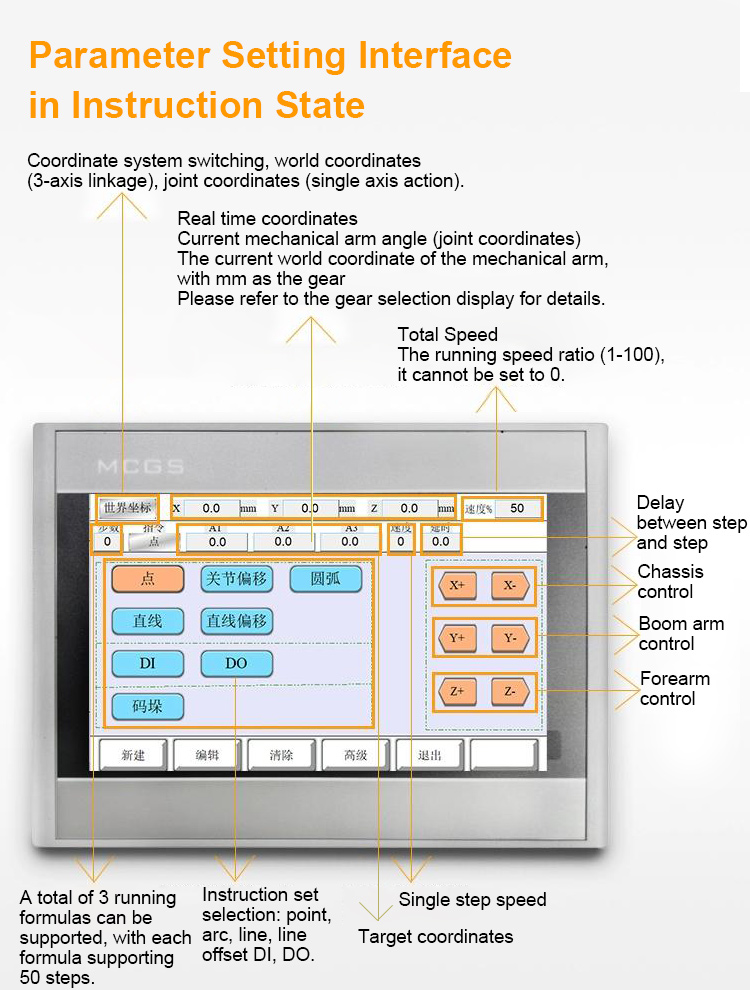
- Movement locus: point-to-point, straight line, joint offset, line offset, circular arc, palletizing
- Reference frame: joint coordinate, world space
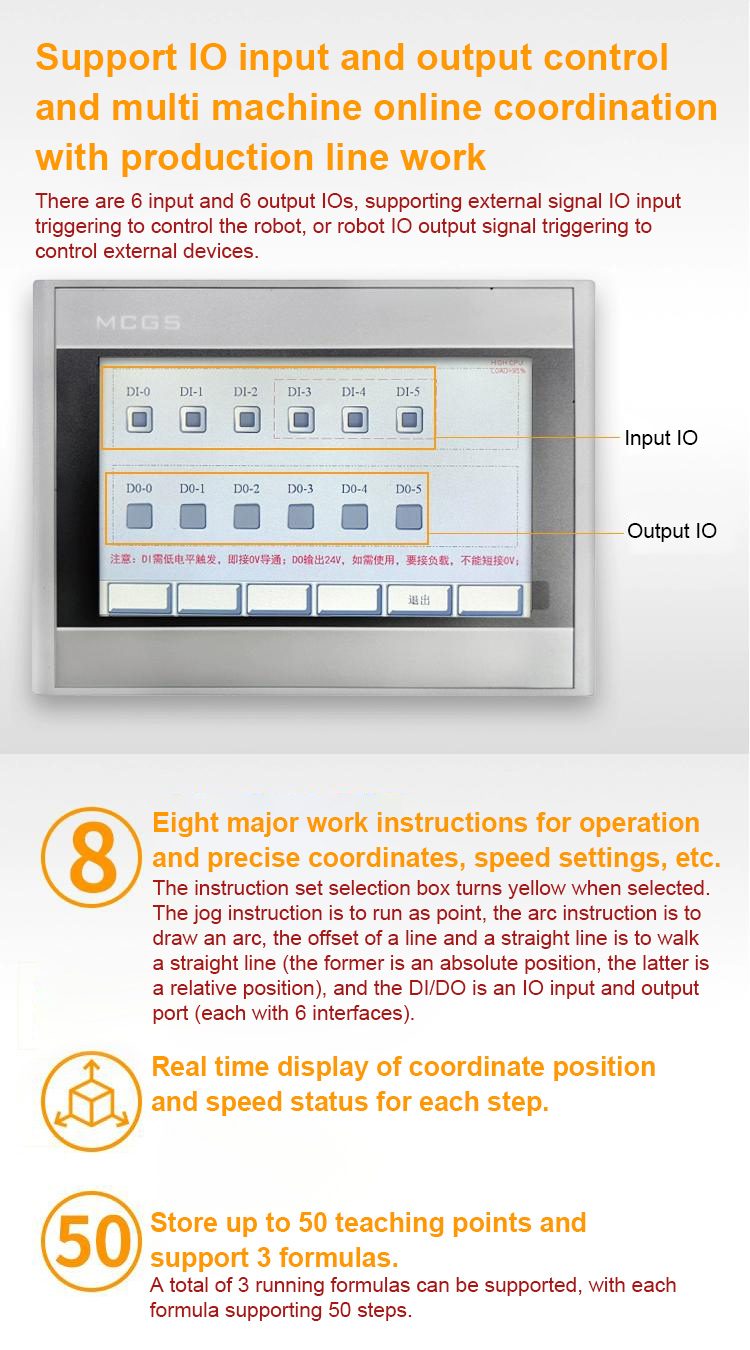
- External communication IO: serial port, 10 x DI, 8 x DO
- Installation methods: ground installation
- Applied environment: avoid contact with flammable, explosive, or corrosive gases or liquids, and stay away from electronic noise sources (plasma).
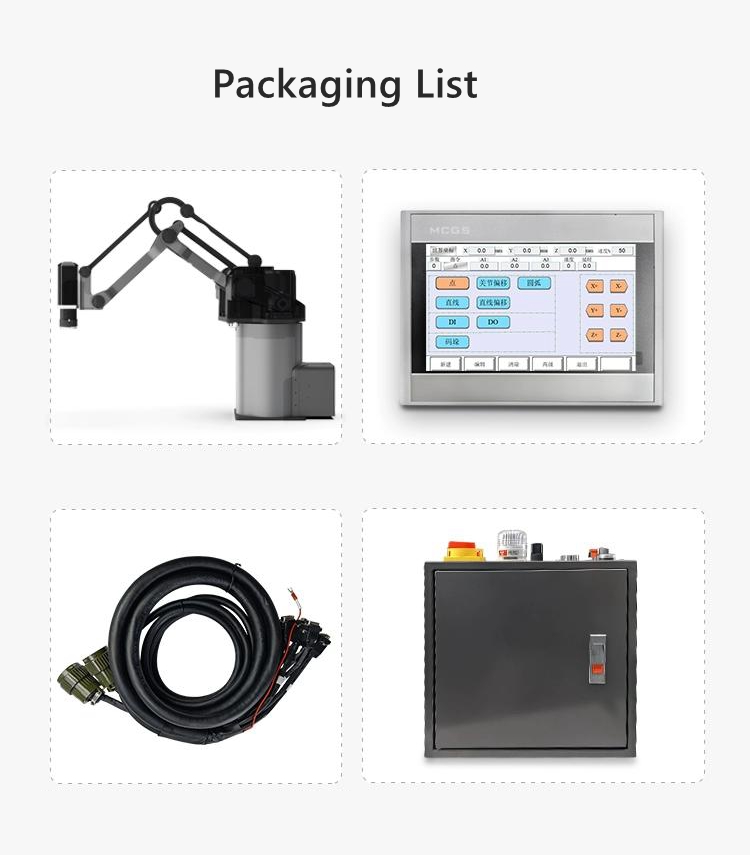
Package Included:
- 1 x Mechanical Arm
- 1 x Touch Screen
- 1 x Controller Cable
- 1 x Controller Box
Note:
- This is the 3-axis mechanical arm with 5KG payload capability, please contact our customer service to get the purchase link if you need the 4-axis mechanical arm with 3KG payload capability.
- Due to its unique nature, the delivery time of the product may be longer the general products. Thanks for your understanding.
FAQ:
Q: Can I set a cycle of operation?
A: The touch screen can support motion node cycling within 50 steps, and the PC can support infinite step cycling.
Q: Is there a power-off saving function for teaching point?
A: Yes.
Q: Can this robot support open source?
A: Not fully open source, the underlying layer provides a communication protocol for robotic arm control, supports secondary development of peripherals and additional functions, interacts with external devices, and on-line.
Description:
- This mechanical arm is an 86+57+57+42 hybrid servo robotic arm with an open bottom open motion control serial communication protocol. It is easy to use for secondary development of user equipment. It can be used for industrial handling, palletizing, loading and unloading, and small spraying. It can support point to point, point to line, line to line, and so on, walking in an arc, DO output, DI input, including world coordinates, that is, it can go straight up and down.
- The control protocol can also support for OPENMV, USB and other cameras to develop visual scenes, interact visually, identify object sizes and positions for transportation (requiring self-developed upper computer), and connect external devices, which can be used for small-scale industrial production.
- This mechanical arm is also equipped with an operation teaching device, which is simple to operate and fast for beginners. The teaching device supports jog teaching and drag teaching. Supports three major user formulas and three independent programs, with a programmable number of 50 points per program. The maximum load of the mechanical arm can reach 5KG.
The functional instructions of the mechanical arm are as follows:
- Mechanical arm zero calibration protocol instruction
- Mechanical arm stop protocol instruction
- Mechanical control chassis protocol instruction
- Protocol instruction for mechanical arm control boom arm motor
- Protocol instruction for mechanical arm control forearm motor
- Air pump switch protocol instruction
- Hand grab switch protocol instruction
- Obtain current world coordinates (mechanical arm) protocol instruction
- Obtain the current angle (mechanical arm) protocol instruction
- Obtain the current input step (mechanical arm) protocol instruction
- Clear program protocol instructions
- Control routing protocol instruction
- Control straight line protocol instruction
- Control arc protocol instruction
- Control DI DO protocol instruction
- Control hand grab protocol instruction
- Control air pump protocol instruction
- Provide mechanical control serial communication protocol
Specification:
- Model: ZKBOT-4086A
- Payload: 5KG
- Position repeat accuracy: +/-0.05mm
- Max speed:
1-axis (bottom rotation): 140 degree/S
2-axis (boom rotation): 120 degree/S
3-axis (forearm rotation): 100 degree/S
4-axis (terminal gyration): 160 degree/S
- Max operating area:
1-axis (bottom rotation): -162 ~ 162 degree
2-axis (boom rotation): -115 ~ 0 degree
3-axis (forearm rotation): -115 ~ 0 degree
4-axis (terminal gyration): -162 ~ 162 degree
- Maximum reach: 710mm
- Working temperature: -10 ~ 50 Celsius degree
- Working voltage: AC 220V/110V
- Power consumption: 100W
- Robot weight: 37kg
- Control mode: teach pendant + drag teaching
- Drive configuration: 86+57+57+42 hybrid servo + high precision helical gear reducer + 3-axis brake
- Movement locus: point-to-point, straight line, joint offset, line offset, circular arc, palletizing
- Reference frame: joint coordinate, world space
- External communication IO: serial port, 10 x DI, 8 x DO
- Installation methods: ground installation
- Applied environment: avoid contact with flammable, explosive, or corrosive gases or liquids, and stay away from electronic noise sources (plasma).
Package Included:
- 1 x Mechanical Arm
- 1 x Touch Screen
- 1 x Controller Cable
- 1 x Controller Box
Note:
- This is the 3-axis mechanical arm with 5KG payload capability, please contact our customer service to get the purchase link if you need the 4-axis mechanical arm with 3KG payload capability.
- Due to its unique nature, the delivery time of the product may be longer the general products. Thanks for your understanding.
FAQ:
Q: Can I set a cycle of operation?
A: The touch screen can support motion node cycling within 50 steps, and the PC can support infinite step cycling.
Q: Is there a power-off saving function for teaching point?
A: Yes.
Q: Can this robot support open source?
A: Not fully open source, the underlying layer provides a communication protocol for robotic arm control, supports secondary development of peripherals and additional functions, interacts with external devices, and on-line.








Payment Terms
1. We accept PayPal,Payoneer,Visa Card,Google pay,Credit card etc.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
2. We ship to your eBay or Paypal address. Please make sure your eBay and Paypal address is correct before you pay.
Shipping Terms
1. We will process the order within the handling time ,if you have any questions, please contact us via eBay message or email.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
2. For remote regions of DHL/FedEx..., extra shipping costs might be charged. Usually it costs about 30USD-50USD. We will contact you if shipping company informed us your address belongs to remote area. Thanks for your understanding.
Return Terms
If you receive the item that not satisfied or defective, please do not open case and kindly notify us within 30 days. We will guide you the returning process for replacement or refund.
Custom Duties & Taxes
1. It is buyer's responsibility to cover the import duties, taxes.We do not charge any taxes and fees, and the possible taxes and fees will be collected by the platform or by third parties such as customs and carriers.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
2. Please check with your country's customs office and inform us what/how much should declare before shipping.
Feedback
1. Please kindly leave us a positive feedback and 5 star DSR if you satisfied with our product and service. Please feel free to contact us firstly if you have any problem with your order, we are responsible and credible seller and will solve the issue it for you asap.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.
2. If you are dissatisfied for any reason, please don't be quick to leave us neutral or negative feedback. We work hard to make sure EVERY CUSTOMER 100% SATISFIED and resolve any problem for you and always leave positive feedback to all our customers.

On Mar 5, 2024 at 04:59:46 PST, seller added the following information: