Product Details
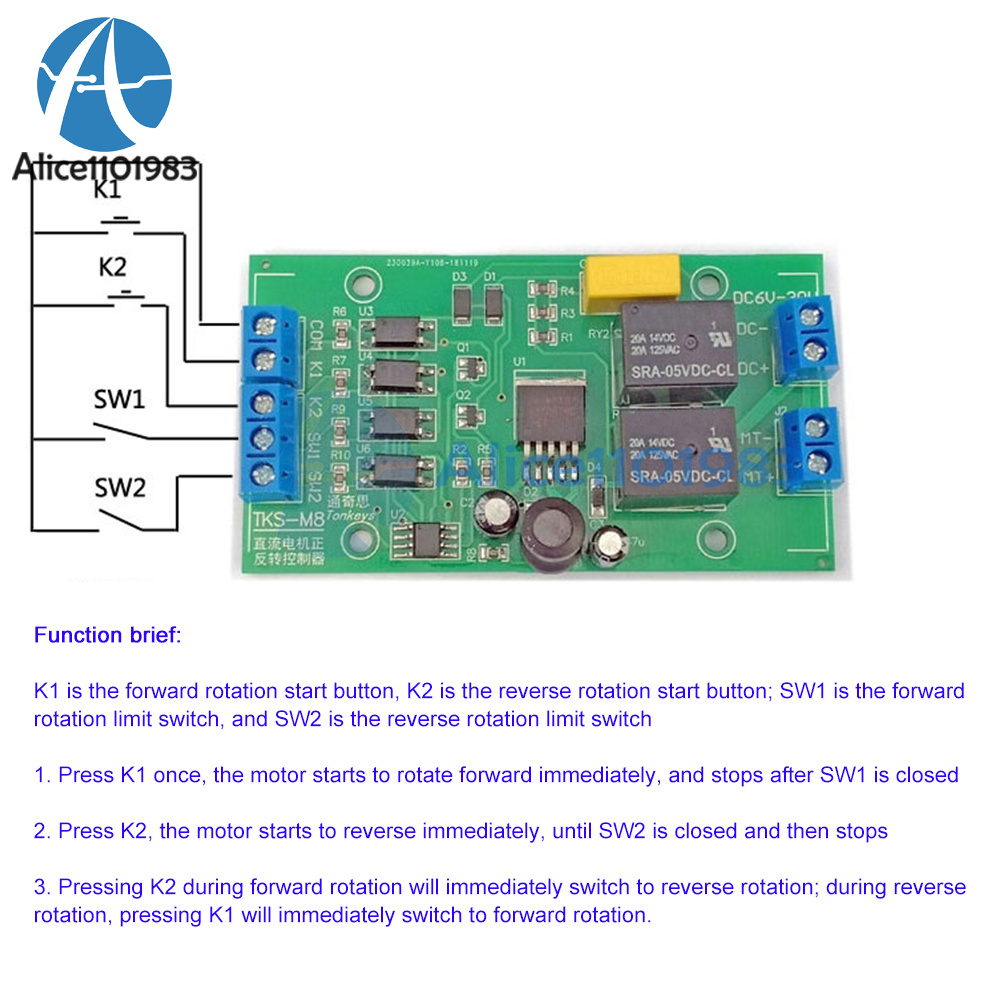
2. Support DC motor forward and reverse
3. Support limit operation
4. Setting parameters can be memorized when power off
5. Support auto lock mode
6. Suitable for occasions with high requirements for motor control
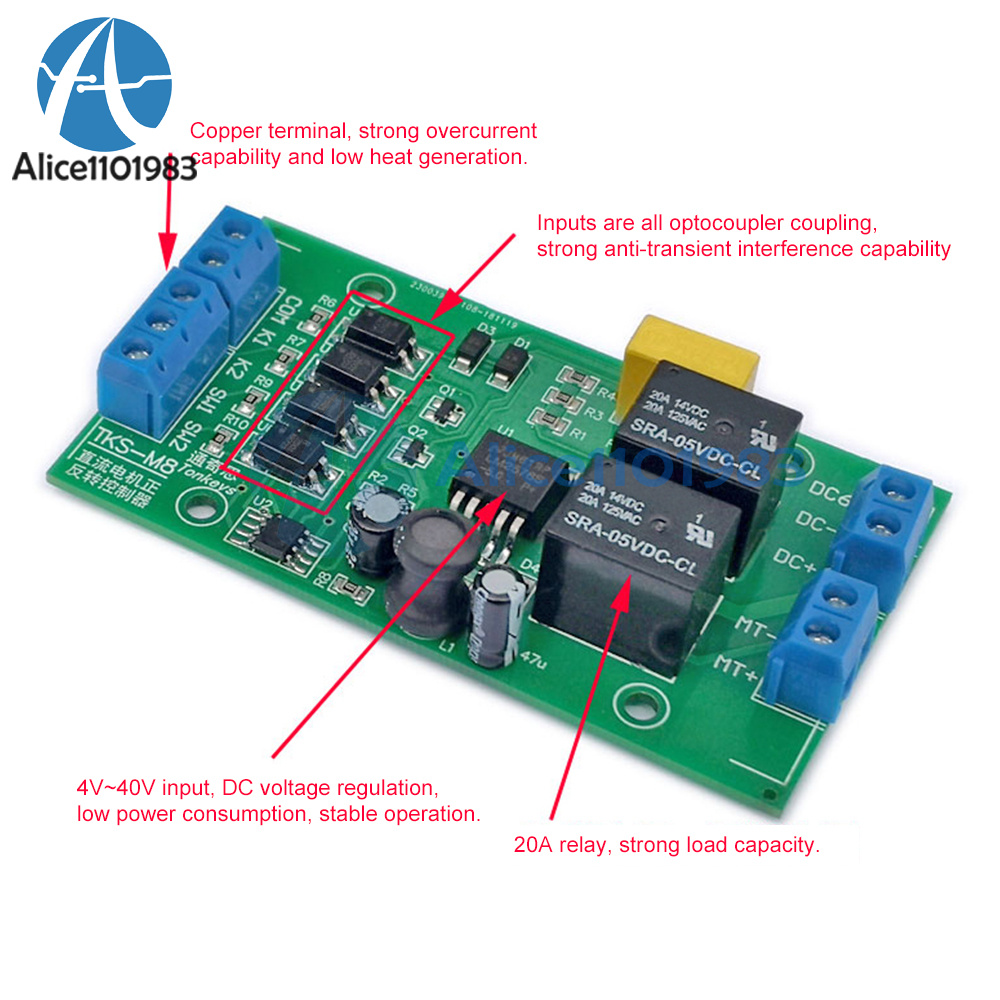
Working voltage: wide voltage DC4V~40V
Module power consumption: 0.6W (without load motor), static 0.1W
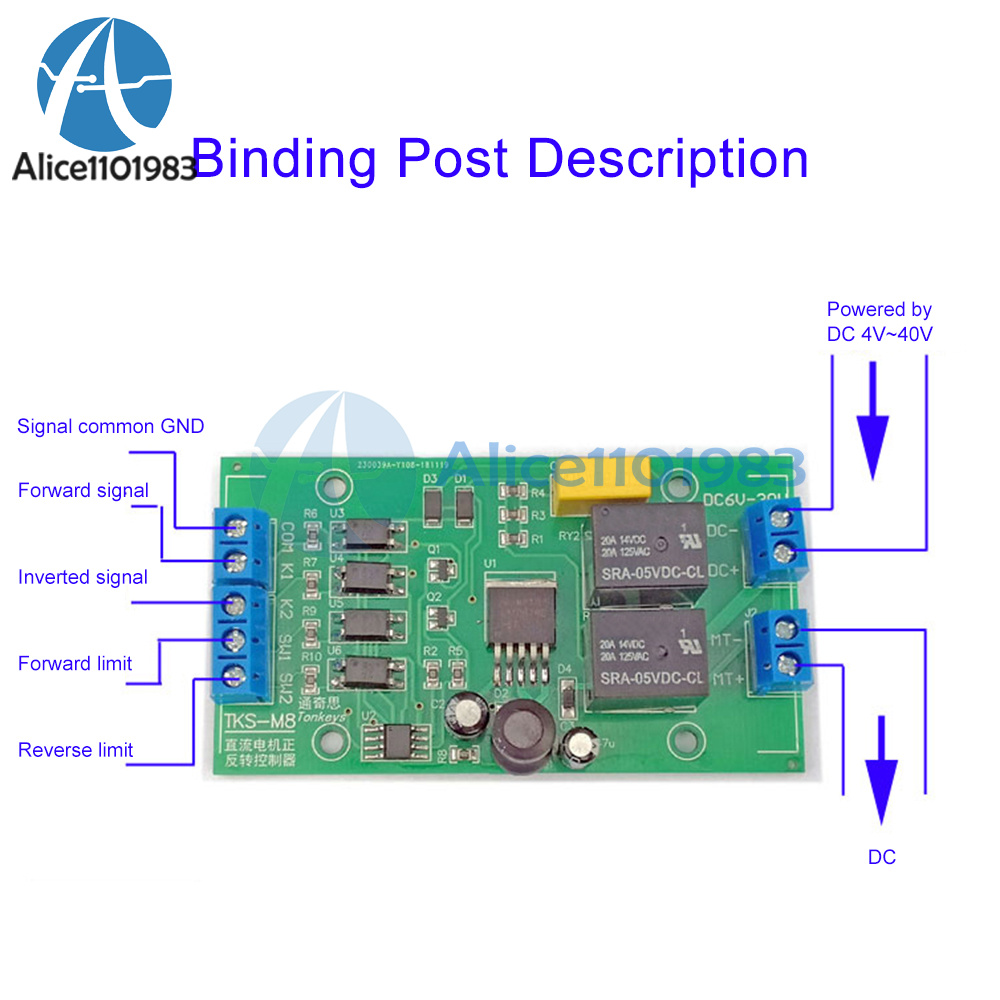
Signal input: active low level, the input is the negative pole of the optocoupler. When the voltage is lower than 2V, it is considered that there is a signal
Response speed: K1 K2 is 20mS, SW1 SW2 is 50mS
Output current: 20A
Action life: > 150,000 times
PO/Standard version: After a short trigger, the motor will keep running until it encounters a limit or commutation signal
P1/jog version: run when there is a signal, stop when there is no signal (ie, press to run, release to stop)
1. What is the difference between PO and P1 versions?
PO is self-locking mode. For example, when the external forward switch (K1) is pressed, the motor will immediately rotate forward. At this time, the switch will be released immediately, and the motor will still keep rotating forward. It will not stop until it encounters the reverse rotation signal (K2) or the forward rotation stop signal (SW1).
P1 is in jog mode. For example, when the external forward switch (K1) is pressed, the motor will rotate forward. When K1 is released, the motor will stop running immediately.
The signal is active low, it can be a three-wire sensor (NPN-NO type), K1 K2 Sw1 SW2 is still this specification.
Valid, for example, if K1 has a signal, it will rotate forward, but the SW1 limit also has a signal, and it will stop at this time (it will not rotate forward).
The limit signal can also be called a stop signal. The limit signal is trigger type and level-enabled. For example, if a short limit signal is encountered during forward rotation, it will stop, even if the limit signal disappears, it will still stop. The forward rotation signal must be restarted to run forward again.
The input voltage range of TKS-M8 is 4v~40v, but to ensure reliable operation, it is recommended to use it in the range of 6V-36V. There is no need to specify 12V or 24V when purchasing, because they are all within the range, and this module is a wide voltage. The output motor is the same as the input voltage.
The maximum current of TKS-M8 is 20A under 12V voltage, and the maximum current is 10A when the operating voltage is 24V. The maximum drive motor power generally does not exceed 80W, and it is recommended that the locked rotor motor of the motor prevail.
TKS-M8 does not have a timing function, so strictly speaking, it cannot automatically reciprocate. However, with the start switch, start switch (A), and end switch (B), it can achieve infinite reciprocating operation between points A and B. Connection method: the start switch and the start switch are connected to K1, the end switch is connected to K2, and SW1 and SW2 are not connected. Note that all switches are normally open.
Package list:
Forward and reverse controller* 1
- EBAY Managed Payment. But we only Accept your Ebay Address, please Make sure it's 100% right.
- Payment must be received in 5 business days of auction closing.
- Please leave note for your special request (e.g. Colors or Size) in PayPal when you pay the order.
- Any special request cannot be accepted after 24 hours of payment, because most of orders will be processed instantly and same day dispatched.
1. We only ship to the confirmed address provided by eBay. please make sure your ebay address is 100% matches the address you would like us to ship to. If not, please let us know before we sent you the package, or we will not be responsible for any loss. hope you could understand.
2. Orders will be processed instantly and dispatched within 1-3 business days except hoilday, so we do NOT accept any email/message note after you place orders.
3. All package need to wait 30 days,Please take care it.Less than 30 days,we can't take a refund.
- All package need to wait 30 days(US only need 7-10 days),Please take care it.Less than 30 days,we can't take a refund.
- If the item is defect when you receive it or you are not satisfied with it, please return it within 14 days for a replacement or money back. But the items must be back in factory condition. Please keep in touch with us and double check the return address before you return it.
- If is item is defective in 12 months, you can return it to us. We will send you a new replacement after receiving the defective item.
We maintain high standards of excellence and strive for 100% customer satisfaction! Feedback is very important to us. We request that you keep in touch with us immediately BEFORE you give us neutral or negative feedback, so that we can satisfactorily address your concerns.